ARC SERIE
DIRECT DRIVE INTEGRATED CYCLOIDAL JOINT ACTUATORS
Rated torque : 3–150 Nm
Max. torque : 530 Nm
Rated voltage : 24–72 V
Rated speed : 80–100 RPM
Communication : CANFD + Ethernet



This next-generation joint actuator combines lightweight design, high burst power, impact resistance, ultra-high precision with low backdrivability, high-frequency communication, and superior integration in a single unit.
Rated torque:3-150NM
Max. torque: 530Nm
Rated voltage: 24-72V
Rated speed: 80-100RPM
Protocol: CANFD+Ethernet +CANFD
Product description
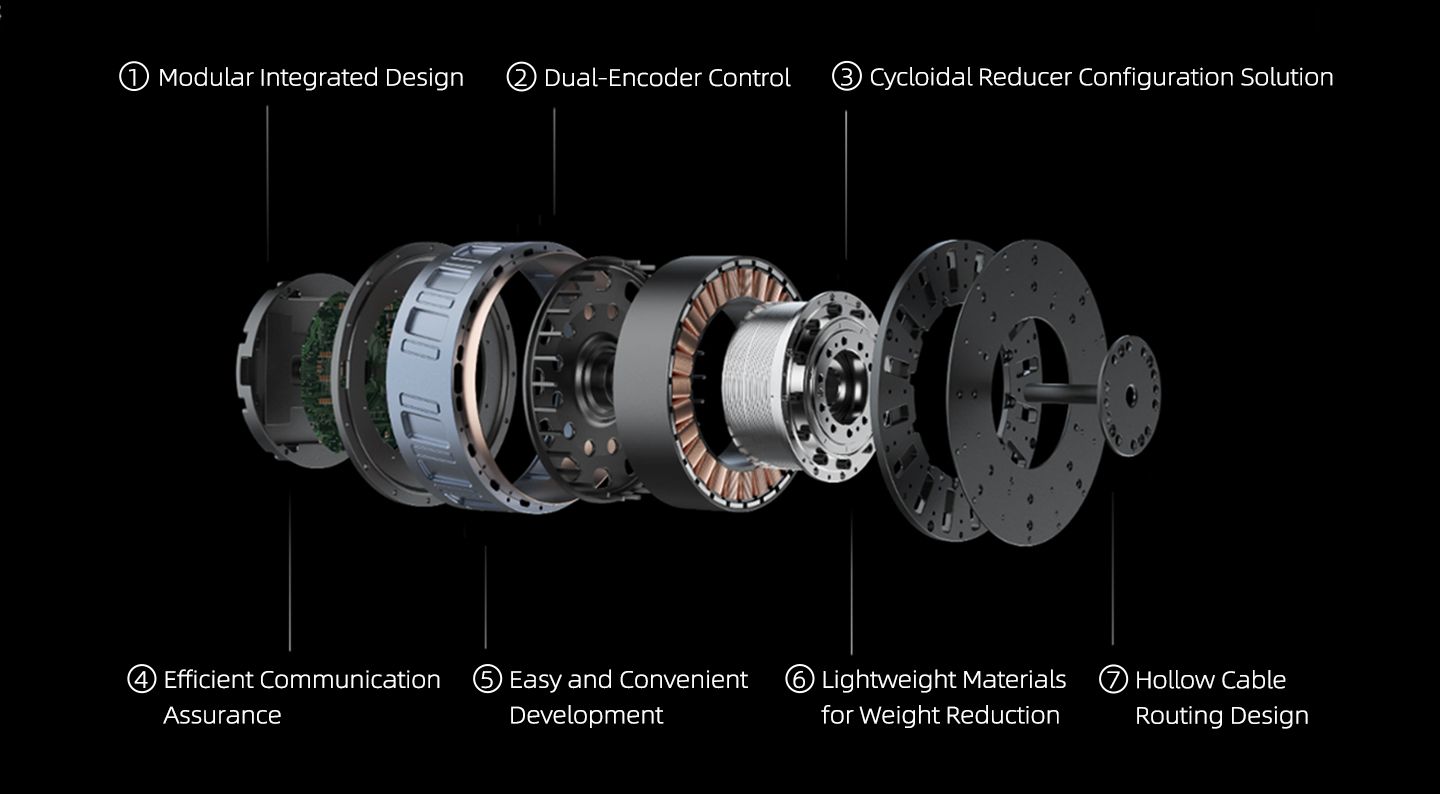
Integrated Cycloidal Joint Module with Direct Drive and Precision Alignment This next-generation joint module combines lightweight design, high burst power, impact resistance, ultra-high precision with low backdrivability, high-frequency communication, and superior integration in a single unit. Equipped with an advanced inertia and damping compensation algorithm, it withstands instantaneous overloads exceeding 5 times the rated torque while achieving repeat positioning accuracy better than 1 arcminute. The module integrates drive controller, reducer, motor, and dual encoders into one compact unit.Featuring a reducer with a built-in cross-roller bearing, its modular design ensures easy maintenance, upgrades, and seamless scalability. This greatly enhances robot expandability and customization potential. Powered by a self-developed hybrid communication architecture of Ethernet +CANFD, the system supports bandwidths exceeding 100 Mbps and delivers hard real-time communication at over 1 kHz, making it an ideal solution for high-frequency, dynamic robotic applications.
DIRECT DRIVE INTEGRATED CYCLOIDAL JOINT ACTUATORS
Rated torque : 3–150 Nm
Max. torque : 530 Nm
Rated voltage : 24–72 V
Rated speed : 80–100 RPM
Communication : CANFD + Ethernet
Structure
Quick selection Parameter
|
Model |
Arc47 |
Arc68 |
Arc78 |
Arc95 |
Arc102 |
Arc150 |
|
Diammeter (mm) |
Φ47*68 |
Φ68*73 |
Φ78*76.5 |
Φ95*85 |
Φ102*49.5 |
Φ150*73.5 |
|
Reducer type |
Cycloidal reducer |
|||||
|
Voltage (V) |
24-72 |
|||||
|
Rated Speed (RPM) |
100 |
100 |
100 |
80 |
100 |
80 |
|
Rated torque (N·m) |
3 |
18 |
35 |
75 |
55 |
180 |
|
No-load speed (RPM) |
120 |
120 |
120 |
90 |
110 |
100 |
|
Peak torque (N·m) |
9 |
58 |
80 |
200 |
200 |
530 |

Lightweight design
Lightweight materials, ultimate weight reduction, the Arc series is as light as only 0.2KG
Self-developed integrated cycloidal reducer, with strong impact resistance and high repeat positioning accuracy.
Balancing weight and performance, it matches a wide range of application scenarios and is more stable and reliable overall

Cycloidal reducer

Self-developed torque motor
Advanced magnetic circuit design technology, creating cutting-edge products in the industry Multi-dimensional parameter optimization of product solutions, reconstructing the new form of robot power.
Precisely control joint movements, provide real-time feedback on output positions, and ensure that movements are executed without the slightest error.

Dual encoder control

High explosive power and impact resistance
Strong performance, breaking through limits The maximum peak torque of the Arc series exceeds 530N·m
Which withstand an instantaneous overload impact force of more than five times
Extremely small back gap, precise control
The backlash of the Arc series is only 1 arc minute. The joint reverse drive torque is as low as less than 1 n.m.
The repeat positioning accuracy is less than 1/60 degree

High precision and low reverse drive force
Humanoid robot

Robot dog

Robotic arm

Exoskeleton robot
| Model | Arc47 | Arc68 | Arc78 | Arc95 | Arc102 | Arc150 |
| Diammeter (mm) | Φ47*68 | Φ68*73 | Φ78*76.5 | Φ95*85 | Φ102*49.5 | Φ150*73.5 |
| Reducer type | Cycloidal reducer | |||||
| Voltage (V) | 24-72 | |||||
| Rated speed (RPM) | 100 | 100 | 100 | 80 | 100 | 80 |
| Rated torque (N·m) | 3 | 18 | 35 | 75 | 55 | 180 |
| No-load speed (RPM) | 120 | 120 | 120 | 90 | 110 | 100 |
| Peak torque (N·m) | 9 | 58 | 80 | 200 | 200 | 530 |
| Communication bus | CANFD | CANFD | CANFD | Ethernet +CANFD | Ethernet +CANFD | Ethernet +CANFD |
| Maximum communication baud rate (Hz) | 4M | 4M | 4M | 100M | 100M | 100M |
| Dual encoder | Yes | |||||