
Home > Harmonic Robot Joint Actuator > P Series Robot Joint Module

This P series robotic joint actuator is one cost-effective robotic joint, supporting CANopen/Ethercat communication, internal double single-turn encoder, for users to save cost investment.
Max rated torque: 84NM
Peak Speed : 60RPM
Rated Voltage: 24-48V
Communication: Canopen/Ethercat
Deep involvement robot joint for many years, committed to helping more customers quickly assemble robots, in order to better adapt to market demand, Avatar Intelligent launched this cost-effective robotic joint actuator supporting CANopen/Ethercat communication, internal double single-turn encoder, for users to save cost investment.

| Model | P08 | P11 | P14 | P17 | P20 | P25 |
| Gear ratio | 51/101 | 51/101 | 51/101 | 51/101 | 81/101/121 | 81/101/121 |
| Rated torque (N.m) at 2000 rpm | 1.25/1.65 |
3.5/5 |
6.6/9.6 |
19.8/30 |
42/50/50 |
78/84/84 |
| Rated speed at the output(rpm) | 39/20 |
39/20 |
39/20 |
39/20 |
25/20/17 |
25/20/17 |
| Hollow diameter (mm) | 4.4 |
6 |
10.8 |
10.8 |
13 |
13 |
| Brake (B/N) | N | N/B | N/B | N/B | N/B | N/B |
| Weight (g) | 186g/N | 400g/455g | 906g/990g | 1090g/1178g | 1606g/1790g | 2600g/2780g |
| Rated operating voltage (VDC) | 24V | 48V | ||||
| CANopen size(mm) | Ф40 x 48.3 | Ф52 x 67.7 | Ф70 x 80.5 | Ф80 x 81.9 | Ф90 x 91.3 | Ф110 x 100.8 |
| EtherCAT size(mm) | N/A | Ф52 x 62 | Ф70 x 83.6 | Ф80 x 85 | Ф90 x 93.8 | Ф110 x 103.3 |


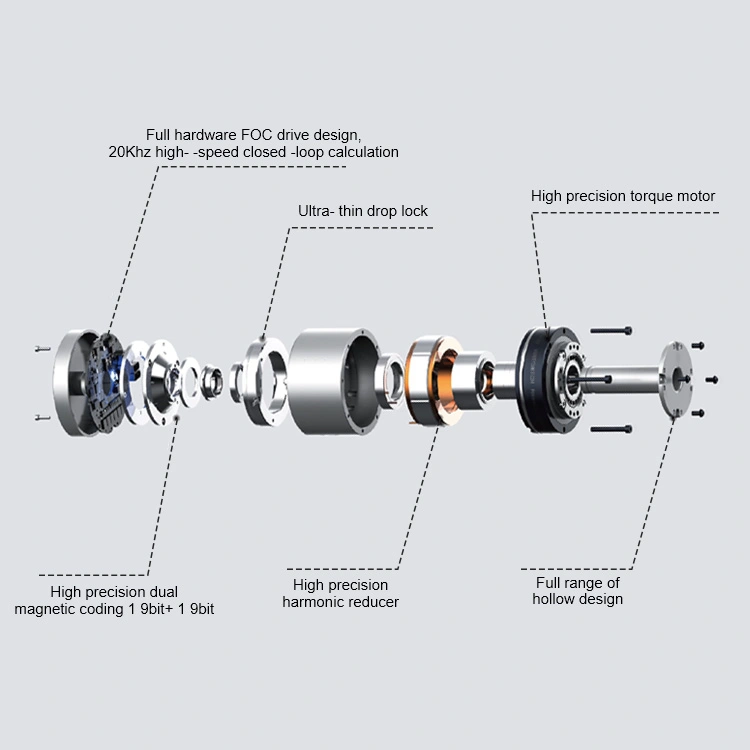
The ultra-thin locking mechanism of the harmonic joint module not only achieves the ultimate compression of physical space, but also redefines the safety boundary. It enables robots to have a more slender arm span, a more flexible posture, and the reliability of remaining on duty even in the event of power failure.
Hardware-level current loop control improves dynamic response speed to microsecond level. Under working conditions such as high-speed start and stop, sudden load changes, and external disturbances, torque compensation can be completed instantly to ensure the flexibility and impact resistance of joint motions, far exceeding traditional software FOC solutions.

It adopts zero-backlash harmonic transmission design to ensure two-way motion engagement without backlash. Transmission error of ≤20 arc seconds provides a nanoscale response basis for trajectory repeatability and cutting roundness.
Full closed-loop rigid transmission from the input end to the output end. The minimally backlash design effectively suppresses system resonance, enhances servo gain, and thereby achieves faster response speed and lower tracking error.
Extend the replacement cycle of core components with wear control technology. Reduce equipment life cycle maintenance costs, reduce downtime losses due to gear wear, and achieve longer maintenance-free operation time.
It has been verified through cumulative thousands of hours of full-load life tests. Under the rated load, the transmission efficiency and accuracy retention capabilities exceed industry standards, ensuring the reliability of long-term continuous operation.


The non-inductive transition from dynamic motion to static locking uses a servo-level braking control algorithm to effectively suppress position overshoot and mechanical resonance at the moment of stopping, ensuring the perfect finish of high-precision processes.
Smooth braking ensures the utmost precision in maintaining the position at the moment of stop, making each sudden stop feel like pressing the pause button rather than the fast-forward button.
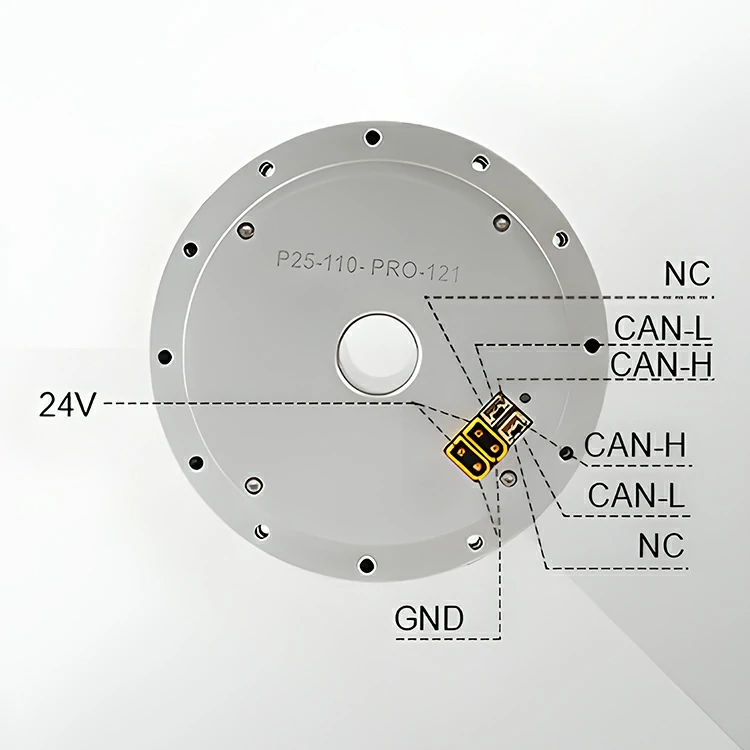
Standard CANopen and EtherCAT communication interfaces, compatible with various mainstream controllers. Make system integration more flexible and efficient.
Flexible and adaptable to different-sized robot systems. Supports bus cascading and distributed clocks, from single-axis control to synchronous networks with dozens of axes, all maintaining real-time communication and data consistency.

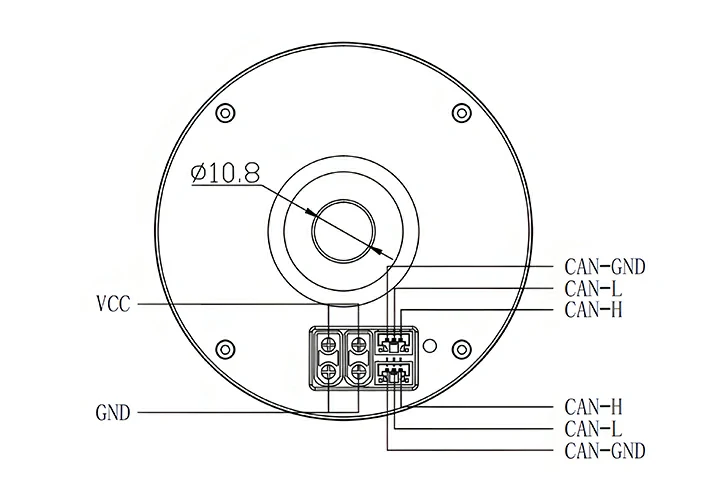
CANopen interface
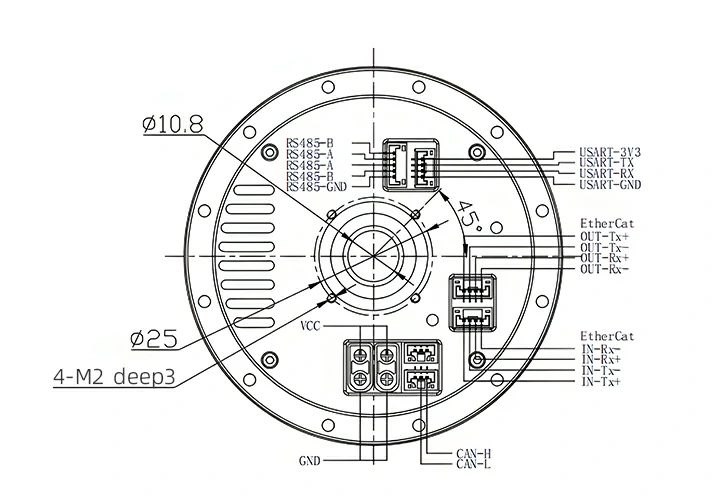 Ethercat interface
Ethercat interfaceThis P series harmonic joint module is the core actuating component for humanoid robots to achieve human-like movements, are mainly used for humanoid robot, Surgical assistance robot, Industrial robots, fire-fighting robot, Mobile robot and etc.
Surgical assistance robot
Industrial robots

Fire-fighting robot

Mobile robot
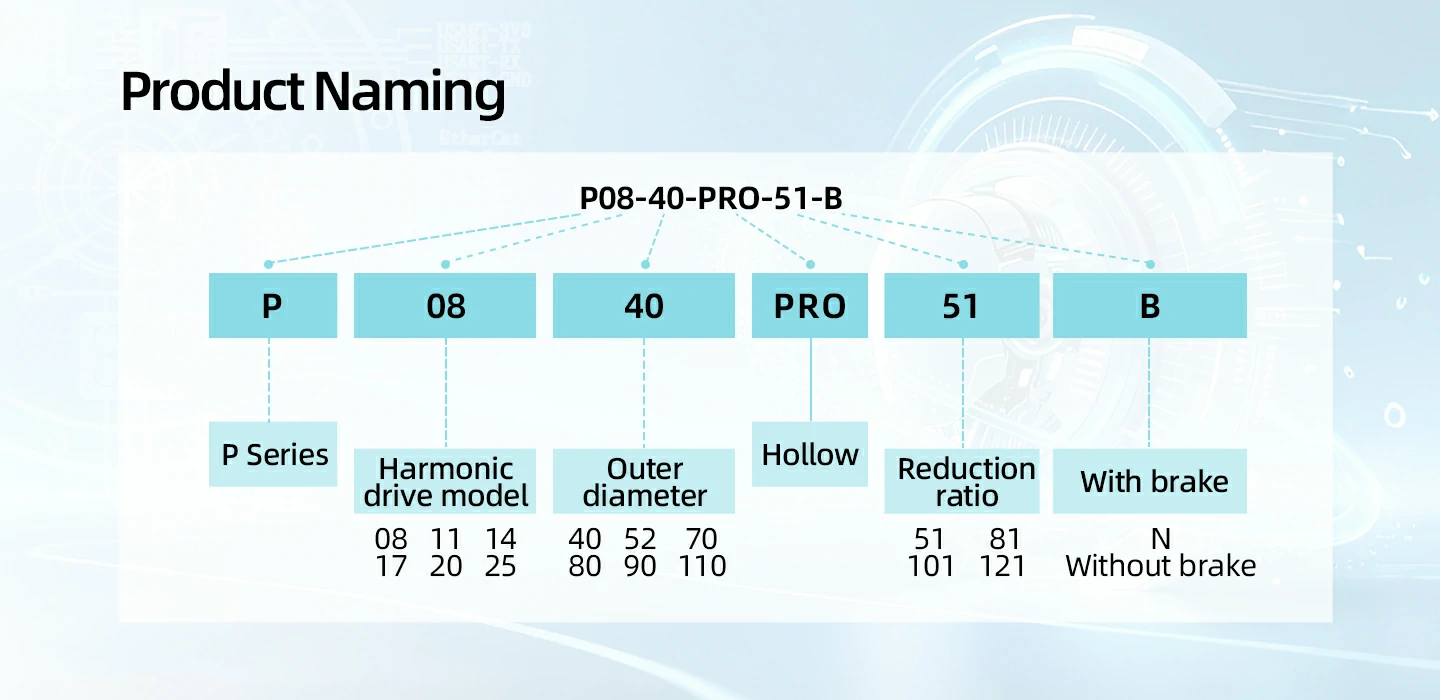
| Model | P08-40-PRO | P11-52-PRO | P14-70-PRO | P17-80-PRO | P20-90-PRO | P25-110-PRO | ||||||||
| Reducer type | harmonic reducer | harmonic reducer | harmonic reducer | harmonic reducer | harmonic reducer | harmonic reducer | ||||||||
| OD | 40/4.6mm | 52/6mm | 70/10.8mm | 80/10.8mm | 90/13mm | 110/13mm | ||||||||
| Reduction ratio | 51 | 101 | 51 | 101 | 51 | 101 | 51 | 101 | 81 | 101 | 121 | 81 | 101 | 121 |
| Drop lock | N | N | N/B | N/B | N/B | N/B | N/B | N/B | N/B | N/B | N/B | N/B | N/B | N/B |
| EtherCAT size | N/A | Ф52 x 62 | Ф70 x 83.6 | Ф80 x 85 | Ф90 x 93.8 | Ф110 x 103.3 | ||||||||
| EtherCAT Weight(without/with drop lock) | N/A | 413g/N/A | 926g/1010g | 1113g/1201g | 1611g / 1795g | 2600g / 2780g | ||||||||
| CANopen size | Ф40 x 48.3 | Ф52 x 67.7 | Ф70 x 80.5 | Ф80 x 81.9 | Ф90 x 91.3 | Ф110 x 100.8 | ||||||||
| CANopen Weight(without/with drop lock) | 186g/N | 400g/455g | 906g/990g | 1090g/1178g | 1606g/1790g | 2600g/2780g | ||||||||
| Reverse backlash | 40arcsec | 30arcsec | 20arcsec | 20arcsec | 20arcsec | 20arcsec | ||||||||
| Noise | <60db | <60db | <60db | <60db | <60db | <60db | ||||||||
| Temperature range | -20~80℃ | -20~80℃ | -20~80℃ | -20~80℃ | -20~80℃ | -20~80℃ | ||||||||
| Working voltage | 24V-36V | 24V-48V | 24V-48V | 24V-48V | 24V-48V | 24V-48V | ||||||||
| Rated power | 36w | 60W | 120W | 200W | 250W | 500W | ||||||||
| Rated speed at the output | 39/20rpm | 39/20rpm | 39/20rpm | 39/20rpm | 25/20/17rpm | 25/20/17rpm | ||||||||
| Rated torque | 1.25/1.65nm | 3.5/5nm | 6.6/9.6nm | 19.8/30nm | 42/50/50nm | 78/84/84nm | ||||||||
| Average load torque at the output | 1.6/2.3nm | 5.5/8.9nm | 8.6/13.5nm | 32/49nm | 58/61/61nm | 107/133/133nm | ||||||||
| Start-stop Peak torque | 2.3/3.3nm | 8.3/11nm | 23/34nm | 42/66nm | 91/102/108nm | 169/194/207nm | ||||||||
| Encoder / Bits | Double Absolute / 16+18bit | |||||||||||||
| Control Mode | Profile Position Mode (PP), Profile Speed Mode (PV), Profile Torque Mode (PT), Cyclic Position Mode (CSP), Cyclic Synchronous Speed Mode (CSV), etc. | |||||||||||||
| Communication protocol | CANopen | EtherCAT / CANopen | ||||||||||||
| Driver interface | Power(DC in DC out)、 CAN (In,Out |
Power(DC in DC out)、 CAN (In,Out)/EtherCAT(In,Out) |
||||||||||||