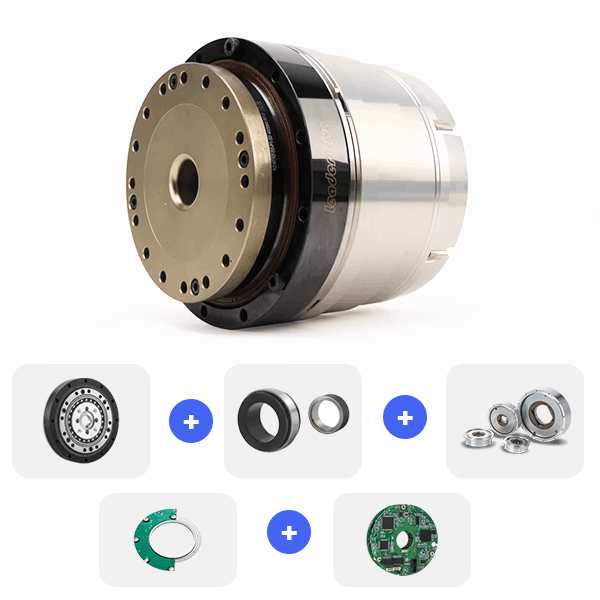
Product description
AT serie hollow internal drive rotary actuator is mainly based on a modular framework. After separately testing the performance of the motor and the reducer, they are encapsulated into one to ensure the high performance of the entire machine. High integration is not merely a simple hardware. The integrated actuator fundamentally solves the problems of design, processing, assembly, inspection, and the matching of different hardware by optimizing tolerance fits and dimensional chains, significantly reducing vibration and noise, achieving inertia matching, reducing axial and radial runout, and minimizing non-concentricity issues.The robot servo motor can be widely applied to collaborative manipulators, medical manipulators, pedestrian robots, special robots, 3C, semiconductorsAGV carts, mobile camera pan-tilt units, etc.
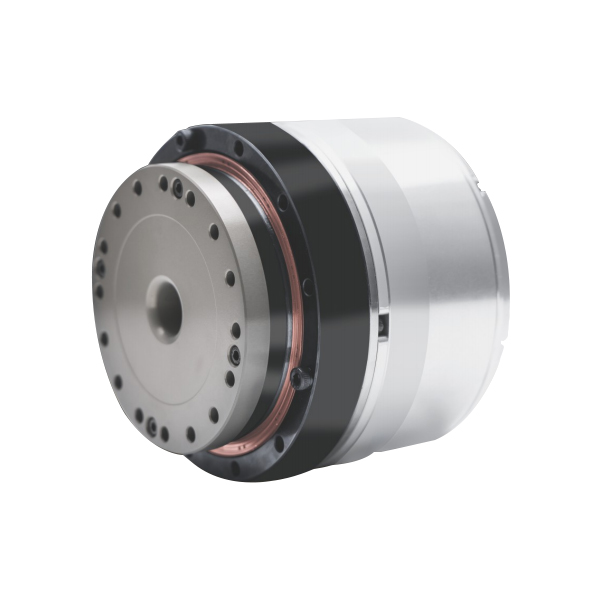
AT Series hollow shaft robot joint actuators
Rated torque:8.6-450NM
Max. torque: 800Nm
Rated voltage: 48V
Rated speed: 25-98RPM
Protocol: EtherCAT_cia402、CANopen_cia402、485_Modbus
Repeated positioning accuracy: ≤10 Arcsec

| Model |
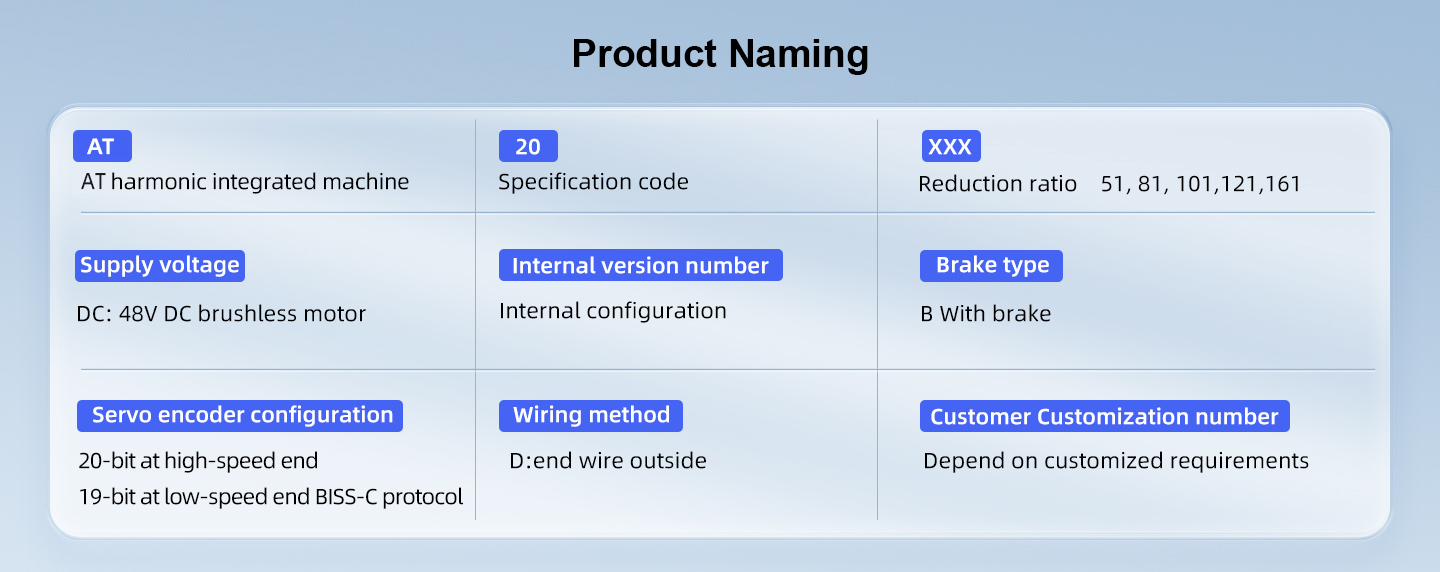
AT-14-XXX |
AT-17-XXX |
AT-20-XXX |
AT-25-XXX |
AT-32-XXX |
AT-40-XXX |
| Reducer ratio |
51 |
81 |
101 |
51 |
81 |
101 |
121 |
51 |
81 |
101 |
121 |
51 |
81 |
101 |
121 |
51 |
81 |
101 |
121 |
51 |
81 |
101 |
121 |
| Peak Torque(NM) |
23 |
29 |
34 |
42 |
53 |
66 |
66 |
69 |
91 |
102 |
108 |
121 |
169 |
194 |
207 |
267 |
376 |
411 |
436 |
280 |
440 |
550 |
660 |
| Rated Torque(NM) |
8.6 |
13.5 |
13.5 |
22 |
33 |
43 |
49 |
39 |
58 |
61 |
61 |
64 |
100 |
125 |
133 |
131 |
206 |
260 |
267 |
140 |
230 |
280 |
340 |
| Peak Speed (RPM) |
98 |
65 |
50 |
78 |
49 |
40 |
33 |
86 |
54 |
44 |
36 |
69 |
43 |
35 |
29 |
59 |
37 |
30 |
25 |
43 |
27 |
22 |
18 |
| Rated Speed (RPM) |
59 |
37 |
30 |
59 |
37 |
30 |
25 |
51 |
32 |
26 |
21 |
49 |
31 |
25 |
21 |
39 |
25 |
20 |
17 |
31 |
20 |
16 |
13 |
| Weight(KG) |
1.2 |
1.6 |
2.2 |
2.9 |
6.3 |
10.9 |
| Diameter (MM) |
74 |
80 |
90 |
110 |
142 |
170 |
| Communication mode |
EtherCAT_cia402, CANopen_cia402, 485_Modbus |
| Voltage (V) |
48 |
Fearures
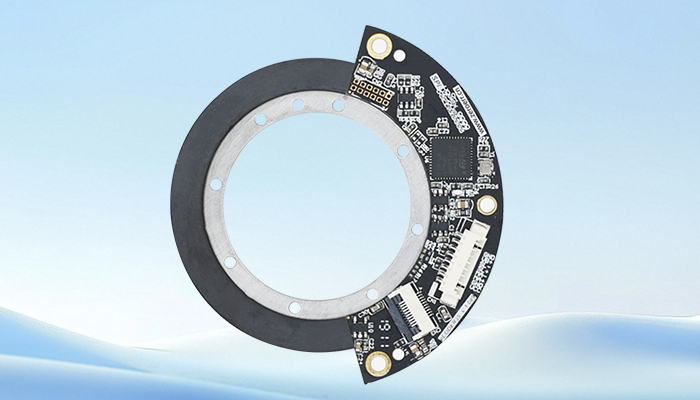
High-precision absolute value encoder
1. 20-bit resolution at high-speed side, 19-bit at output side, with control accuracy up to 15 arcsec.
2. Output side integrates a 12-bit multi-turn counter, enabling unlimited rotation without wiring through the center hole.
3. Operates across full 360° without backup battery, eliminating battery maintenance concerns.
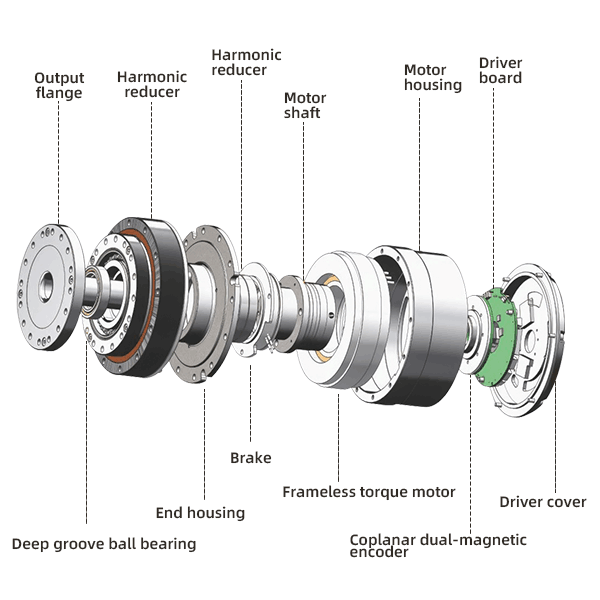
Ultra-thin leader drive harmonic reducer
1. The standard leader drive harmonic reducer has a precision retention life of up to 15,000 hours within the rated load range.
2. The internal three-bearing support system ensures smoother operation at the high-speed end, high load-bearing capacity and long service life.
3. Harmonic reducers has low torque fluctuation, low noise, minimal vibration and stable performance .
High-density frameless torque motor
1. High per unit volume power density ,and the rated torque of the series motors ranges from 0.32N.m to 6N.m.
2. The stator is standardly equipped with potting process, which has better heat dissipation performance and a maximum instantaneous overload capacity of 2.7 times.
3. By adopting fractional slot winding and magnetic steel shaping, the torque fluctuation rate of the torque motor's tooth slot is controlled below 0.5%.
Electromagnetic friction brake
1. 14-25 adopts permanent magnet brakes, which are small in size and compact in structure. The mechanical structure ensures no braking clearance and no shaking during start and stop
2. The 23-40 adopts an ultra-thin non-excitation brake with intelligent PWM voltage control, achieving high-torque braking force at low power consumption and energy efficiency
3. It features high structural stability, low operating noise and high braking torque density per unit volume
Application
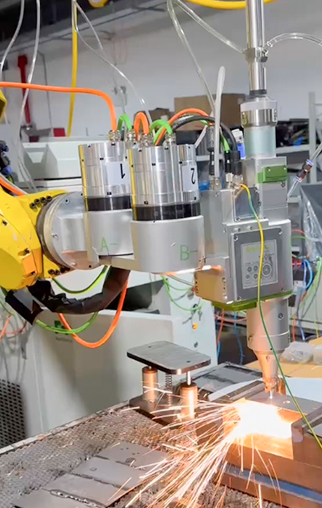
Robot laser cutting machine
wall-climbing robot
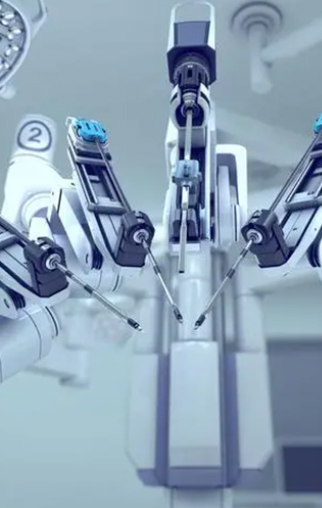
Surgical robot
3C panel equipment