SP planetary robot joint module is a highly integrated micro-servo joint with precision planetary reducer, torque motor and professional servo drive, which forming a drive control integration. The planetary joints are connected in series through the CAN bus, the wiring is simple and easy to operate, and the failure rate of the whole robot joints is low.
Max rated torque: 12NM
Peak Speed : 50RPM
Rated Voltage: 24V
Communication: Can
SP(Servo-Planetary) series planetary robot joint module is an integrated Servo joint actuators developed and produced by Avatar Robotics. SP planetary robot joint module is a highly integrated micro-servo joint with precision planetary reducer, torque motor and professional servo drive, which forming a drive control integration. The planetary joints are connected in series through the CAN bus, the wiring is simple and easy to operate, and the failure rate of the whole robot joints is low; The planetary has small size and large torque, especially suitable for bionic robot, bionic animal, educational robot arm and other multi-joint combination application scenarios; At the same time, the integrated planetary Servo joint actuators can replace a variety of brushless motors and large torque steering gear because of its high cost performance and stable performance




SP series planetary robot joint actuators are extremely lightweight and compact size.The smallest one is only 180g, the planetary joint motors greatly reduce the operation energy consumption.
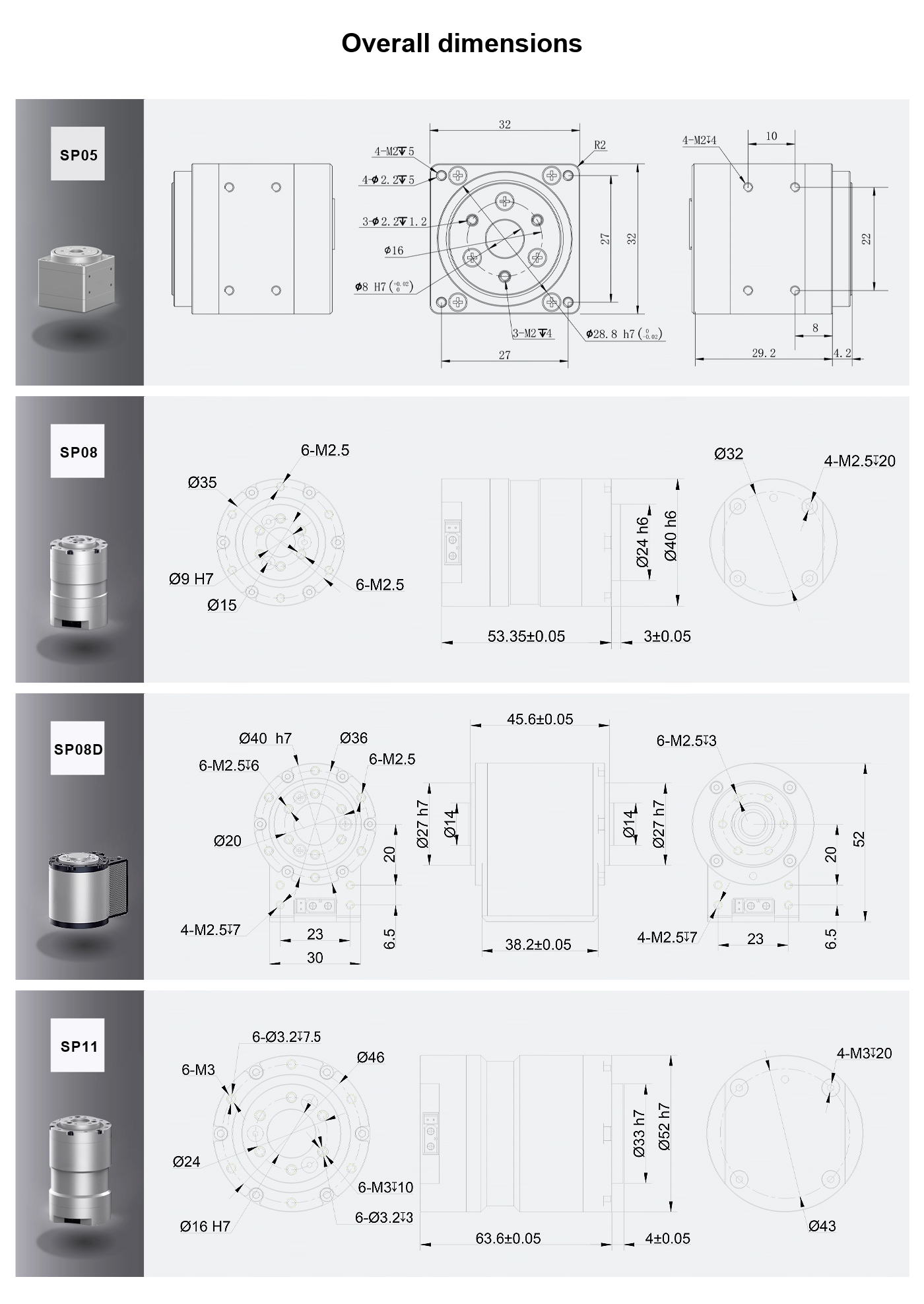
| Model | SP05 | SP08 | SP08D | SP11 | SP11D | SP11L |
| Diameter | 32mm | 40mm | 40mm | 52mm | 52mm | 52mm |
| Length | 33.4mm | 52mm | 48mm | 64mm | 61mm | 82mm |
| Weight | 180g | 180g | 200g | 388g | 428g | 494g |
| Reduction Ratio | 6:1 | 36:1 | ||||
| Working Voltage | 24V | |||||
| Max Power | 35W | 36W | 60W | 72W | ||
| Rated Speed | 50RPM | |||||
| Rated Torque | 0.2NM | 1.0NM | 6.6NM | 12NM | ||
| Peak Torque | 0.48NM | 2.2NM | 14NM | 18NM | ||








Wrist joint
Expression joint

Elbow joint
Neck spin

Shoulder joint
Thigh joint


Elbow joint
Neck joint
Ankle joint
Shoulder joint
Thigh joint
Knee joint

Arm joint
Shoulder joint








| Model | SP05 | SP08 | SP08D | SP11 | SP11D | SP11L |
| Motor Type | Brushless torque motor | |||||
| Reducer Type | Planetary reducer | |||||
| Diameter | 32mm | 40mm | 40mm | 52mm | 52mm | 52mm |
| Length | 33.4mm | 52mm | 48mm | 64mm | 61mm | 82mm |
| Weight | 180g | 180g | 200g | 388g | 428g | 494g |
| Reduction Ratio | 6:1 | 36:1 | ||||
| Reverse Backlash | 12arcmin | |||||
| Noise | <70db | |||||
| Temperature Range | -20~80℃ | |||||
| Working Voltage | 24V | |||||
| Max Power | 35W | 36W | 60W | 72W | ||
| Rated Speed | 50RPM | |||||
| Rated Torque | 0.2NM | 1.0NM | 6.6NM | 12NM | ||
| Peak Torque | 0.48NM | 2.2NM | 14NM | 18NM | ||
| Phase Current Full Scale | 4.0A | 14A | 20A | |||
| Maximum Busbar Current | 1.5A | 5A | 2A | |||
| Static Busbar Current | 0.04A | |||||
| Torque Coefficient | 1.1NM/A | 1.1NM/A | 2.2NM/A | 6NM/A | ||
| Radial Force | 2520N | 3150N | ||||
| Axial Force | 1284N | 1605N | ||||