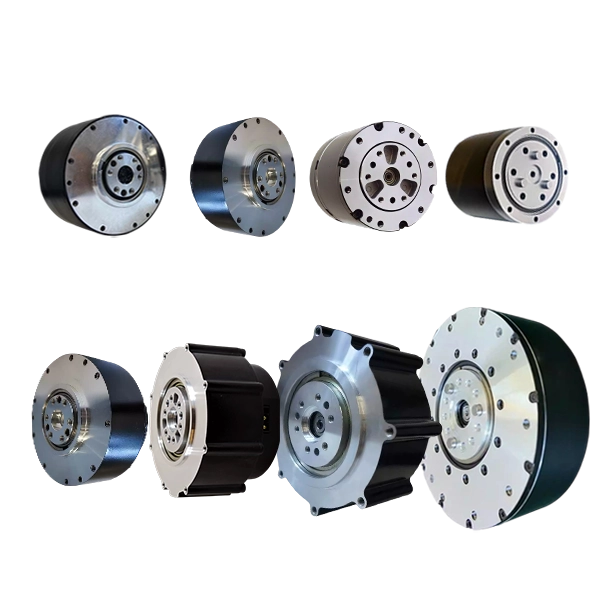


The RE Series Integrated Direct-Drive Planetary Joint Actuator is a compact, high-performance robotic joint module engineered for advanced robotic systems, including quadruped robots, humanoid robots, collaborative robotic arms, AGVs, and intelligent automation platforms.
Product description
The RE Series Integrated Direct-Drive Planetary Joint Actuator is a compact, high-performance robotic joint module engineered for advanced robotic systems, including quadruped robots, humanoid robots, collaborative robotic arms, AGVs, and intelligent automation platforms.
This integrated robotic actuator combines a high-efficiency brushless DC motor, precision planetary gearbox, embedded servo drive, and high-resolution absolute magnetic encoder into a single lightweight and space-optimized unit. The fully integrated design reduces wiring complexity, improves system reliability, and delivers exceptional torque density, motion precision, and dynamic response for space-constrained and high-mobility robotic applications.
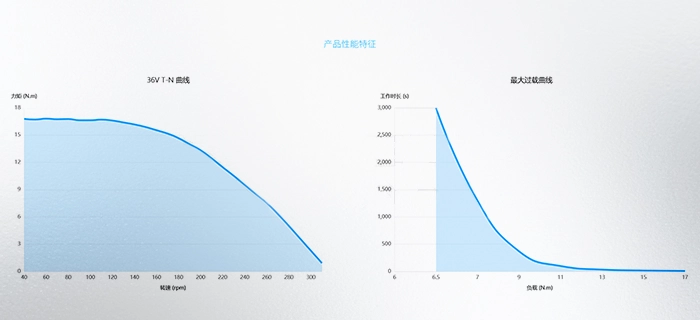
The RE Series actuator balances high output torque with low inertia and excellent backdrivability, enabling smooth, compliant, and highly responsive motion control for complex articulated robotic joints. Wi
th advanced Field-Oriented Control (FOC) technology and a wide operating voltage range (24 V–48 V), it ensures precise torque control, stable performance, and long-term durability in demanding environments.
To meet diverse system integration requirements, the RE Series supports CANopen communication protocol and MIT protocol, enabling seamless compatibility with modern robotic controllers and real-time motion control architectures. This makes it suitable for distributed servo systems, intelligent robot joints, and modular robotic platforms.

| Model | RE-00 | RE-01 | RE-02 | RE-03 | RE-04 | RE-05 | RE-06 | RE-02 IP67 |
| Reduction ratio | 10:1 | 7.75:1 | 7.75:1 | 9:1 | 9:1 | 7.75:1 | 9:1 | 7.75 : 1 |
| Rated Voltage | 48V | 48V | 48V | 48V | 48V | 48V | 48V | 48V |
| Voltage Range | 24-60V | 24-60V | 24-60V | 15-60V | 15-60V | 15-60V | 15-60V | 24-60V |
| Rated Output Power | 50w ±10% | 60w ±10% | 60w ±10% | 210W±10% | 420w ±10% | 17W±10% | 115W±10% | 170W±10% |
| Rated Torque | 5N.m | 6N.m | 6N.m | 20N.m | 40N.m | 1.6N.m | 11N.m | 6N.m |
| Peak Torque | 14N.m | 17N.m | 17N.m | 60N.m | 120N.m | 5.5N.m | 36N.m | 17N.m |
| Rated Load Speed | 100 rpm ± 10% | 100rpm ± 10% | 100rpm ± 10% | 100rpm±10% | 100 rpm ± 10% | 100 rpm ± 10% | 100 rpm ± 10% | 360 rpm ± 10% |
| Weight | 310g ±3g | 380g ±3g | 405g ±3g | 900g±20g | 1420g±20g | 191g | 621g | 490g± 5g |
| Drive Method | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC |
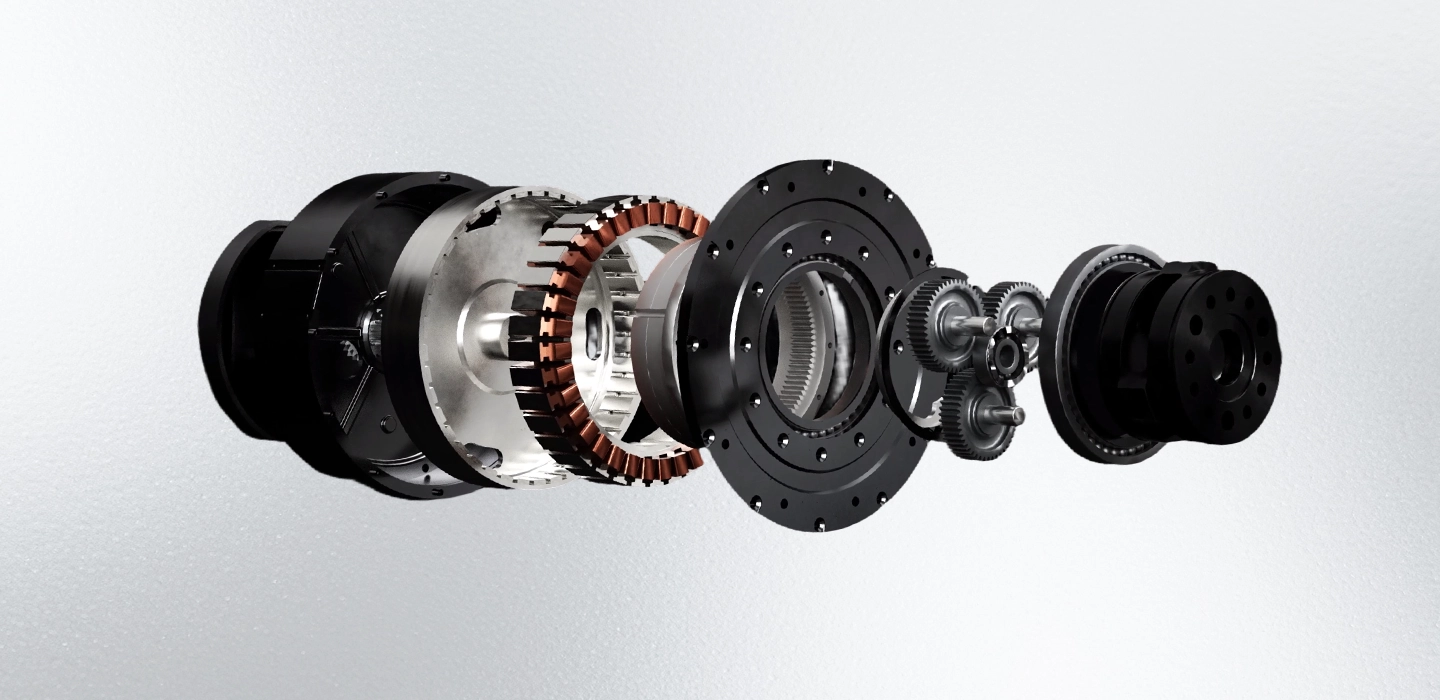
The RE Series integrates a brushless DC motor, embedded servo drive, precision planetary gearbox, and absolute encoder into a single robotic joint actuator module. This eliminates external drivers and complex wiring, simplifying system integration and improving reliability
Engineered for space-constrained robotic systems, the high-efficiency planetary gear reduction delivers exceptional torque density (maximum torque density can reach 85.71 N.m/Kg)while maintaining a lightweight and compact footprint — ideal for quadruped robots and humanoid joints.


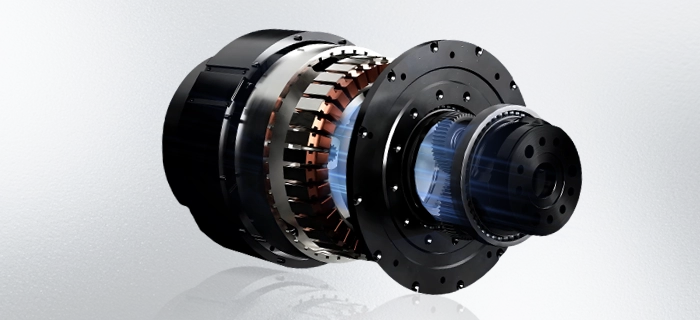
Achieve true output-side precision control with dual-encoder feedback and ultra-low backlash transmission.
-True closed-loop accuracy
-Eliminates cumulative mechanical error
-Improved motion stability & smoothness
-Higher precision in grasping & positioning
Advanced Field-Oriented Control (FOC) ensures stable torque output, reduced vibration, and high control accuracy. Combined with high-resolution encoder feedback, it delivers precise positioning for demanding robotic motion applications.

Seamless Integration into Modern Robotic Systems
The RE Series supports CANopen communication protocol for industrial automation systems and MIT protocol for advanced robotic torque control architectures, enabling flexible integration with distributed servo networks and robotic controllers.
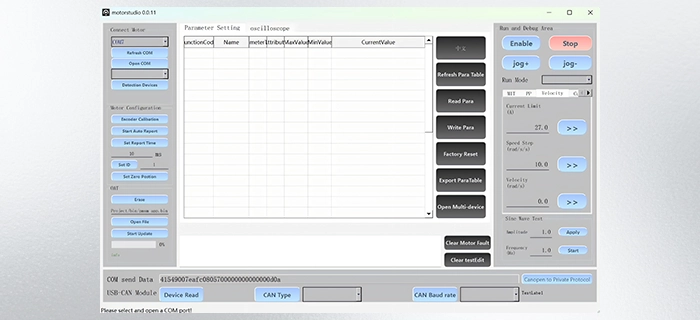
Providing complete debug software, debug modules and routines,
From first connection to full customization — everything is ready for your development.
Complete development toolkit provided
-Debug software
-Communication tools
-Pre-configured debug modules
Application
Humanoid robot

Quadruped robot

Power steering unit
Automation control
| Model | RE-00 | RE-01 | RE-02 | RE-03 | RE-04 | RE-05 | RE-06 | RE-02 IP67 |
| Reduction ratio | 10:1 | 7.75:1 | 7.75:1 | 9:1 | 9:1 | 7.75:1 | 9:1 | 7.75 : 1 |
| Rated Voltage | 48V | 48V | 48V | 48V | 48V | 48V | 48V | 48V |
| Voltage Range | 24-60V | 24-60V | 24-60V | 15-60V | 15-60V | 15-60V | 15-60V | 24-60V |
| Rated Output Power | 50w ±10% | 60w ±10% | 60w ±10% | 210W±10% | 420w ±10% | 17W±10% | 115W±10% | 170W±10% |
| Rated Torque | 5N.m | 6N.m | 6N.m | 20N.m | 40N.m | 1.6N.m | 11N.m | 6N.m |
| Peak Torque | 14N.m | 17N.m | 17N.m | 60N.m | 120N.m | 5.5N.m | 36N.m | 17N.m |
| Rated Load Speed | 100 rpm ± 10% | 100rpm ± 10% | 100rpm ± 10% | 100rpm±10% | 100 rpm ± 10% | 100 rpm ± 10% | 100 rpm ± 10% | 360 rpm ± 10% |
| Rated Load Phase Current | 4.7Apk ± 10% | 7Apk ± 10% | 7Apk ± 10% | 13Apk ± 10% | 27Apk ± 10% | 2.4Apk ± 10% | 14.3Apk ± 10% | 7Apk ± 10% |
| Peak Phase Current | 15.5Apk ± 10% | 23Apk ± 10% | 23Apk ± 10% | 43Apk ± 10% | 90Apk ± 10% | 11Apk ± 10% | 57Apk ± 10% | 23Apk ± 10% |
| No-load Speed | 315 rpm ± 10% | 410 rpm ± 10% | 410 rpm ± 10% | 195rpm±10% | 200 rpm ± 10% | 480 rpm ± 10% | 480 rpm ± 10% | 410 rpm ± 10% |
| No-load Current | 0.5 Arms | 0.5 Arms | 0.5 Arms | 0.6Arms ±10% | 0.7 Arms ±10% | 0.14 Arms ±10% | 0.98 Arms ±10% | 0.5 Arms ±10% |
| Weight | 310g ±3g | 380g ±3g | 405g ±3g | 900g±20g | 1420g±20g | 191g | 621g | 490g± 5g |
| Drive Method | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC |
| Running Direction | CW/CCW | CW/CCW | CW/CCW | CW/CCW | CW/CCW | CW/CCW | CW/CCW | CW/CCW |
| Temperature Range | -20~50℃ | -20~50℃ | -20~50℃ | -20~50℃ | -20~50℃ | -20~50℃ | -20~50℃ | -20~50℃ |
| Humidity Range | 5~85% | 5~85% | 5~85% | 5~85% | 5~85% | 5~85% | 5~85% | 5~85% |
| Storage Temperature Range | -30~70℃ | -30~70℃ | -30~70℃ | -30~70℃ | -30~70℃ | -30~70℃ | -30~70℃ | -30~70℃ |
| Insulation Level | Class B | Class B | Class B | Class B | Class B | Class B | Class B | Class B |
| Insulation Resistance/ Stator Winding | DC 500VAC, 100M 0hms | DC 500VAC, 100M 0hms | DC 500VAC, 100M 0hms | DC 500VAC, 100M 0hms | DC 500VAC, 100M 0hms | DC 500VAC, 100M 0hms | DC 500VAC, 100M 0hms | DC 500VAC, 100M 0hms |
| High Voltage Resistance/ Stator and Casing | 600VAC, 1s, 2mA | 600VAC, 1s, 2mA | 600VAC, 1s, 2mA | 600VAC, 1s, 2mA | 600VAC, 1s, 2mA | 600VAC, 1s, 2mA | 600VAC, 1s, 2mA | 600VAC, 1s, 2mA |
| Back-EMF | 0.095 Vrms/rpm ±10% | 0.096 Vrms/rpm ±10% | 0.096 Vrms/rpm ±10% | 17Vrms/krpm ±10% | 16.9 Vrms/krpm ±10% | 7.4Vrms/krpm ±10% | 7.6Vrms/krpm ±10% | 0.096Vrms/rpm ± 10% |
| Line Resistance | 1.5±10%Ω | 0.55Ω | 0.55Ω | 0.39Ω±10% | 0.16Ω ± 10% | 2.72Ω ± 10% | 0.23Ω ± 10% | 0.58Ω |
| Torque Constant | 1.48 N.m/Arms | 1.22 N.m/Arms | 1.22 N.m/Arms | 2.36N.m/Arms | 2.1N.m/Arms | 0.94N.m/Arms | 1.1N.m/Arms | 1.22N.m/Arms |
| Inductance | 750±20μH | 486±20%μH | 486±20%μH | 0.275mH±10% | 0.211mH ±10% | 0.813mH ±10% | 0.165mH ±10% | 187~339μH |
| Pole | 28 | 28 | 28 | 42 | 42 | 20 | 28 | 28 |
| Phase | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |
| Magnetic Encoder | 2 pcs | 2 pcs | 2 pcs | 2 pcs | 2 pcs | 2pcs | 2pcs | 2pcs |
| Item | RE-00 |
| Reduction ratio | 10:1 |
| Rated Voltage | 48V |
| Voltage Range | 24-60V |
| Rated Output Power | 50w ±10% |
| Rated Torque | 5N.m |
| Peak Torque | 14N.m |
| Rated Load Speed | 100 rpm ± 10% |
| Rated Load Phase Current | 4.7Apk ± 10% |
| Peak Phase Current | 15.5Apk ± 10% |
| No-load Speed | 315 rpm ± 10% |
| No-load Current | 0.5 Arms |
| Weight | 310g ±3g |
| Drive Method | FOC |
| Running Direction | CW/CCW |
| Temperature Range | -20~50℃ |
| Humidity Range | 5~85% |
| Storage Temperature Range | -30~70℃ |
| Insulation Level | Class B |
| Insulation Resistance/ Stator Winding | DC 500VAC, 100M 0hms |
| High Voltage Resistance/ Stator and Casing | 600VAC, 1s, 2mA |
| Back-EMF | 0.095 Vrms/rpm ±10% |
| Line Resistance | 1.5±10%Ω |
| Torque Constant | 1.48 N.m/Arms |
| Inductance | 750±20μH |
| Pole | 28 |
| Phase | 3 |
| Magnetic Encoder | 2 pcs |
| Item | RE-01 |
| Reduction ratio | 7.75:1 |
| Rated Voltage | 48V |
| Voltage Range | 24-60V |
| Rated Output Power | 60w ±10% |
| Rated Torque | 6N.m |
| Peak Torque | 17N.m |
| Rated Load Speed | 100rpm ± 10% |
| Rated Load Phase Current | 7Apk ± 10% |
| Peak Phase Current | 23Apk ± 10% |
| No-load Speed | 410 rpm ± 10% |
| No-load Current | 0.5 Arms |
| Weight | 380g ±3g |
| Drive Method | FOC |
| Running Direction | CW/CCW |
| Temperature Range | -20~50℃ |
| Humidity Range | 5~85% |
| Storage Temperature Range | -30~70℃ |
| Insulation Level | Class B |
| Insulation Resistance/ Stator Winding | DC 500VAC, 100M 0hms |
| High Voltage Resistance/ Stator and Casing | 600VAC, 1s, 2mA |
| Back-EMF | 0.096 Vrms/rpm ±10% |
| Line Resistance | 0.55Ω |
| Torque Constant | 1.22 N.m/Arms |
| Inductance | 486±20%μH |
| Pole | 28 |
| Phase | 3 |
| Magnetic Encoder | 2 pcs |
| Item | RE-02 |
| Reduction ratio | 7.75:1 |
| Rated Voltage | 48V |
| Voltage Range | 24-60V |
| Rated Output Power | 60w ±10% |
| Rated Torque | 6N.m |
| Peak Torque | 17N.m |
| Rated Load Speed | 100rpm ± 10% |
| Rated Load Phase Current | 7Apk ± 10% |
| Peak Phase Current | 23Apk ± 10% |
| No-load Speed | 410 rpm ± 10% |
| No-load Current | 0.5 Arms |
| Weight | 405g ±3g |
| Drive Method | FOC |
| Running Direction | CW/CCW |
| Temperature Range | -20~50℃ |
| Humidity Range | 5~85% |
| Storage Temperature Range | -30~70℃ |
| Insulation Level | Class B |
| Insulation Resistance/ Stator Winding | DC 500VAC, 100M 0hms |
| High Voltage Resistance/ Stator and Casing | 600VAC, 1s, 2mA |
| Back-EMF | 0.096 Vrms/rpm ±10% |
| Line Resistance | 0.55Ω |
| Torque Constant | 1.22 N.m/Arms |
| Inductance | 486±20%μH |
| Pole | 28 |
| Phase | 3 |
| Magnetic Encoder | 2 pcs |
| Item | RE-03 |
| Reduction ratio | 9:1 |
| Rated Voltage | 48V |
| Voltage Range | 15-60V |
| Rated Output Power | 210W±10% |
| Rated Torque | 20N.m |
| Peak Torque | 60N.m |
| Rated Load Speed | 100rpm±10% |
| Rated Load Phase Current | 13Apk ± 10% |
| Peak Phase Current | 43Apk ± 10% |
| No-load Speed | 195rpm±10% |
| No-load Current | 0.6Arms ±10% |
| Weight | 900g±20g |
| Drive Method | FOC |
| Running Direction | CW/CCW |
| Temperature Range | -20~50℃ |
| Humidity Range | 5~85% |
| Storage Temperature Range | -30~70℃ |
| Insulation Level | Class B |
| Insulation Resistance/ Stator Winding | DC 500VAC, 100M 0hms |
| High Voltage Resistance/ Stator and Casing | 600VAC, 1s, 2mA |
| Back-EMF | 17Vrms/krpm ±10% |
| Line Resistance | 0.39Ω±10% |
| Torque Constant | 2.36N.m/Arms |
| Inductance | 0.275mH±10% |
| Pole | 42 |
| Phase | 3 |
| Magnetic Encoder | 2 pcs |
| Item | RE-04 |
| Reduction ratio | 9:1 |
| Rated Voltage | 48V |
| Voltage Range | 15-60V |
| Rated Output Power | 420w ±10% |
| Rated Torque | 40N.m |
| Peak Torque | 120N.m |
| Rated Load Speed | 100 rpm ± 10% |
| Rated Load Phase Current | 27Apk ± 10% |
| Peak Phase Current | 90Apk ± 10% |
| No-load Speed | 200 rpm ± 10% |
| No-load Current | 0.7 Arms ±10% |
| Weight | 1420g±20g |
| Drive Method | FOC |
| Running Direction | CW/CCW |
| Temperature Range | -20~50℃ |
| Humidity Range | 5~85% |
| Storage Temperature Range | -30~70℃ |
| Insulation Level | Class B |
| Insulation Resistance/ Stator Winding | DC 500VAC, 100M 0hms |
| High Voltage Resistance/ Stator and Casing | 600VAC, 1s, 2mA |
| Back-EMF | 16.9 Vrms/krpm ±10% |
| Line Resistance | 0.16Ω ± 10% |
| Torque Constant | 2.1N.m/Arms |
| Inductance | 0.211mH ±10% |
| Pole | 42 |
| Phase | 3 |
| Magnetic Encoder | 2 pcs |
| Item | RE-05 |
| Reduction ratio | 7.75:1 |
| Rated Voltage | 48V |
| Voltage Range | 15-60V |
| Rated Output Power | 17W±10% |
| Rated Torque | 1.6N.m |
| Peak Torque | 5.5N.m |
| Rated Load Speed | 100 rpm ± 10% |
| Rated Load Phase Current | 2.4Apk ± 10% |
| Peak Phase Current | 11Apk ± 10% |
| No-load Speed | 480 rpm ± 10% |
| No-load Current | 0.14 Arms ±10% |
| Weight | 191g |
| Drive Method | FOC |
| Running Direction | CW/CCW |
| Temperature Range | -20~50℃ |
| Humidity Range | 5~85% |
| Storage Temperature Range | -30~70℃ |
| Insulation Level | Class B |
| Insulation Resistance/ Stator Winding | DC 500VAC, 100M 0hms |
| High Voltage Resistance/ Stator and Casing | 600VAC, 1s, 2mA |
| Back-EMF | 7.4Vrms/krpm ±10% |
| Line Resistance | 2.72Ω ± 10% |
| Torque Constant | 0.94N.m/Arms |
| Inductance | 0.813mH ±10% |
| Pole | 20 |
| Phase | 3 |
| Magnetic Encoder | 2pcs |
| Item | RE-06 |
| Reduction ratio | 9:1 |
| Rated Voltage | 48V |
| Voltage Range | 15-60V |
| Rated Output Power | 115W±10% |
| Rated Torque | 11N.m |
| Peak Torque | 36N.m |
| Rated Load Speed | 100 rpm ± 10% |
| Rated Load Phase Current | 14.3Apk ± 10% |
| Peak Phase Current | 57Apk ± 10% |
| No-load Speed | 480 rpm ± 10% |
| No-load Current | 0.98 Arms ±10% |
| Weight | 621g |
| Drive Method | FOC |
| Running Direction | CW/CCW |
| Temperature Range | -20~50℃ |
| Humidity Range | 5~85% |
| Storage Temperature Range | -30~70℃ |
| Insulation Level | Class B |
| Insulation Resistance/ Stator Winding | DC 500VAC, 100M 0hms |
| High Voltage Resistance/ Stator and Casing | 600VAC, 1s, 2mA |
| Back-EMF | 7.6Vrms/krpm ±10% |
| Line Resistance | 0.23Ω ± 10% |
| Torque Constant | 1.1N.m/Arms |
| Inductance | 0.165mH ±10% |
| Pole | 28 |
| Phase | 3 |
| Magnetic Encoder | 2pcs |
| Item | RE-02 IP67 |
| Reduction ratio | 7.75 : 1 |
| Rated Voltage | 48V |
| Voltage Range | 24-60V |
| Rated Output Power | 170W±10% |
| Rated Torque | 6N.m |
| Peak Torque | 17N.m |
| Rated Load Speed | 360 rpm ± 10% |
| Rated Load Phase Current | 7Apk ± 10% |
| Peak Phase Current | 23Apk ± 10% |
| No-load Speed | 410 rpm ± 10% |
| No-load Current | 0.5 Arms ±10% |
| Weight | 490g± 5g |
| Drive Method | FOC |
| Running Direction | CW/CCW |
| Temperature Range | -20~50℃ |
| Humidity Range | 5~85% |
| Storage Temperature Range | -30~70℃ |
| Insulation Level | Class B |
| Insulation Resistance/ Stator Winding | DC 500VAC, 100M 0hms |
| High Voltage Resistance/ Stator and Casing | 600VAC, 1s, 2mA |
| Back-EMF | 0.096Vrms/rpm ± 10% |
| Line Resistance | 0.58Ω |
| Torque Constant | 1.22N.m/Arms |
| Inductance | 187~339μH |
| Pole | 28 |
| Phase | 3 |
| Magnetic Encoder | 2pcs |
