
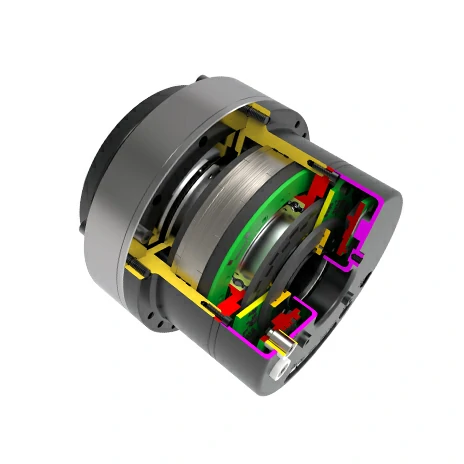
The HAD Series harmonic actuator delivers high precision and outstanding value. It features a proprietary tooth-profile reducer for improved transmission accuracy and efficiency, combined with a highly integrated and compact design.
Max Rated Torque: 380 Nm
Rated Speed: 39.6 rpm
Rated Voltage: 48 V
Communication: EtherCAT / CAN FD

| Model | HAD-08 | HAD-11 | HAD-14 | HAD-17 | HAD-20 | HAD-25 | HAD-32 | HAD-40 |
| Reduction Ratio | 101 | 101 | 101 | 101 | 101 | 101 | 101 | 101 |
| Rated Torque(N.m) | 2.4 | 4.8 | 15 | 35 | 60 | 90 | 200 | 380 |
| Maximum Allowable Torque for Start and Stop(N.m) | 4.5 | 11 | 35 | 70 | 120 | 230 | 484 | 840 |
| Rated Speed RPM(N.m) | 39.6 | 39.6 | 39.6 | 39.6 | 39.6 | 39.6 | 29.7 | 18.6 |
| Diameter × Axial Length)(mm) | Φ52*60 | Φ52*61 | Φ70*72 | Φ80*77 | Φ90*87 | Φ110*102.5 | Φ142*160 | Φ170*210 |
| Weight(Kg) | 0.23 | 0.5 | 0.7 | 0.9 | 1.3 | 2.2 | 4.8 | 7 |
| DC Voltage | 48V | |||||||
| Communication | EtherCAT/CANFD | |||||||

1.Higher Torque Output
Innovative tooth profile with over 1/3 gear engagement improves load distribution and increases torque by up to 15%.
2.High Precision
Harmonic drive design provides near-zero backlash and excellent positioning accuracy.
3.Compact & Lightweight.
High reduction ratio in a compact and integrated structure, ideal for robotic joints.
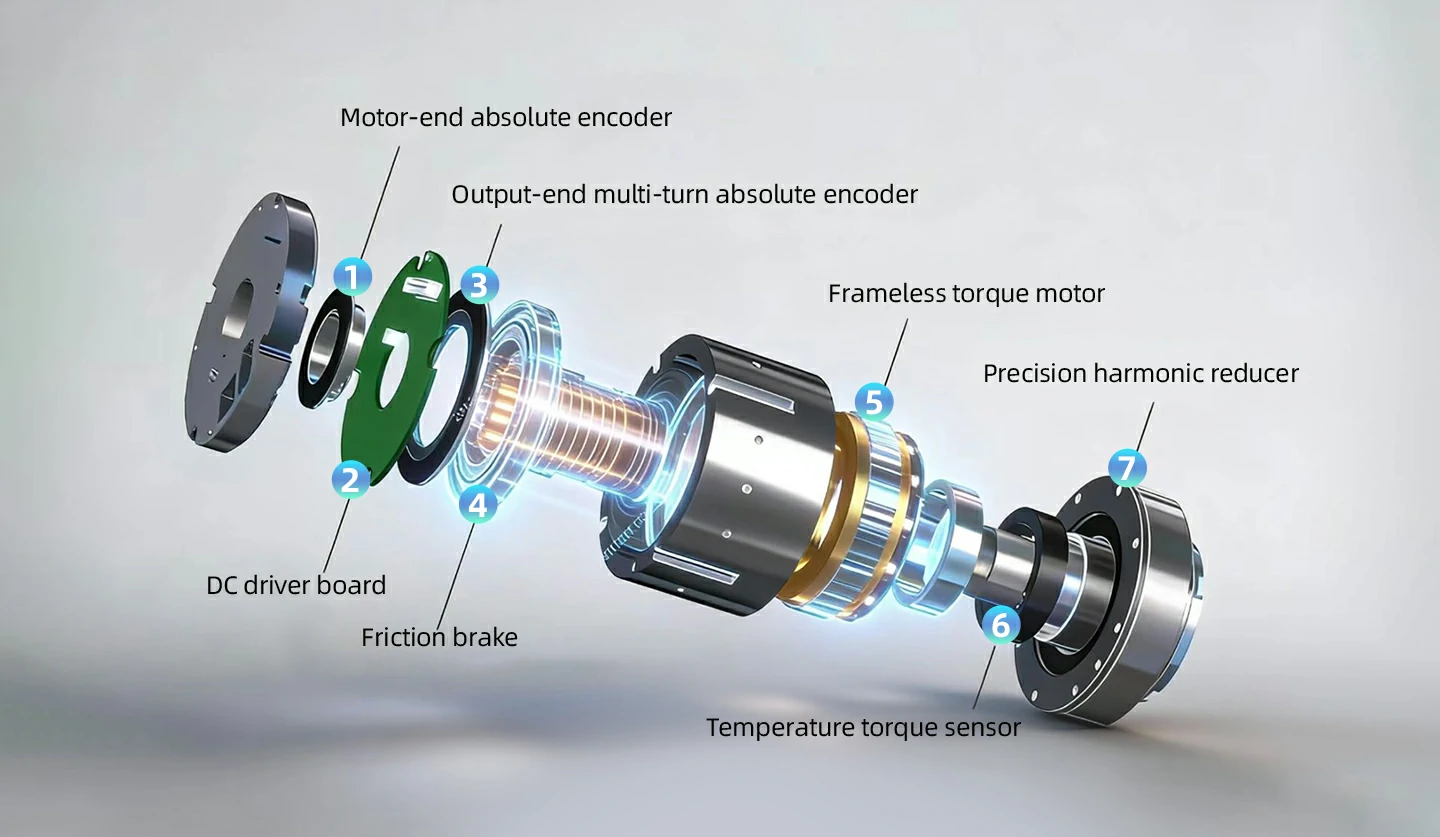
1.Higher Position Accuracy
Real-time monitoring of both motor and output positions ensures more precise motion control.
2.Improved Safety and Reliability
Detects transmission errors and improves system safety.
3.Better Motion Performance
Enables more stable control and smoother movement for robotic applications.

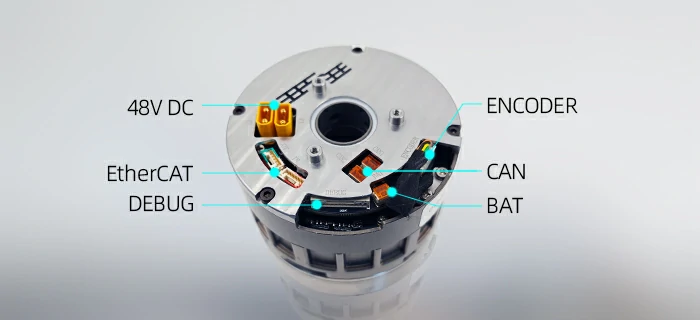
1.High-Speed Real-Time Control
EtherCAT enables fast, deterministic communication for precise motion control.
2.Reliable and Flexible Networking
CAN FD provides stable communication with higher data bandwidth and strong noise immunity.
3.Easy System Integration
Compatible with mainstream robotic and automation control systems.
1.High Torque Density
Delivers high torque in a compact size.
2.Smooth and Precise Motion
Provides stable, low-vibration performance for precise control.
3.High Efficiency and Long Service Life
Brushless design reduces wear and ensures reliable operation.

Product Application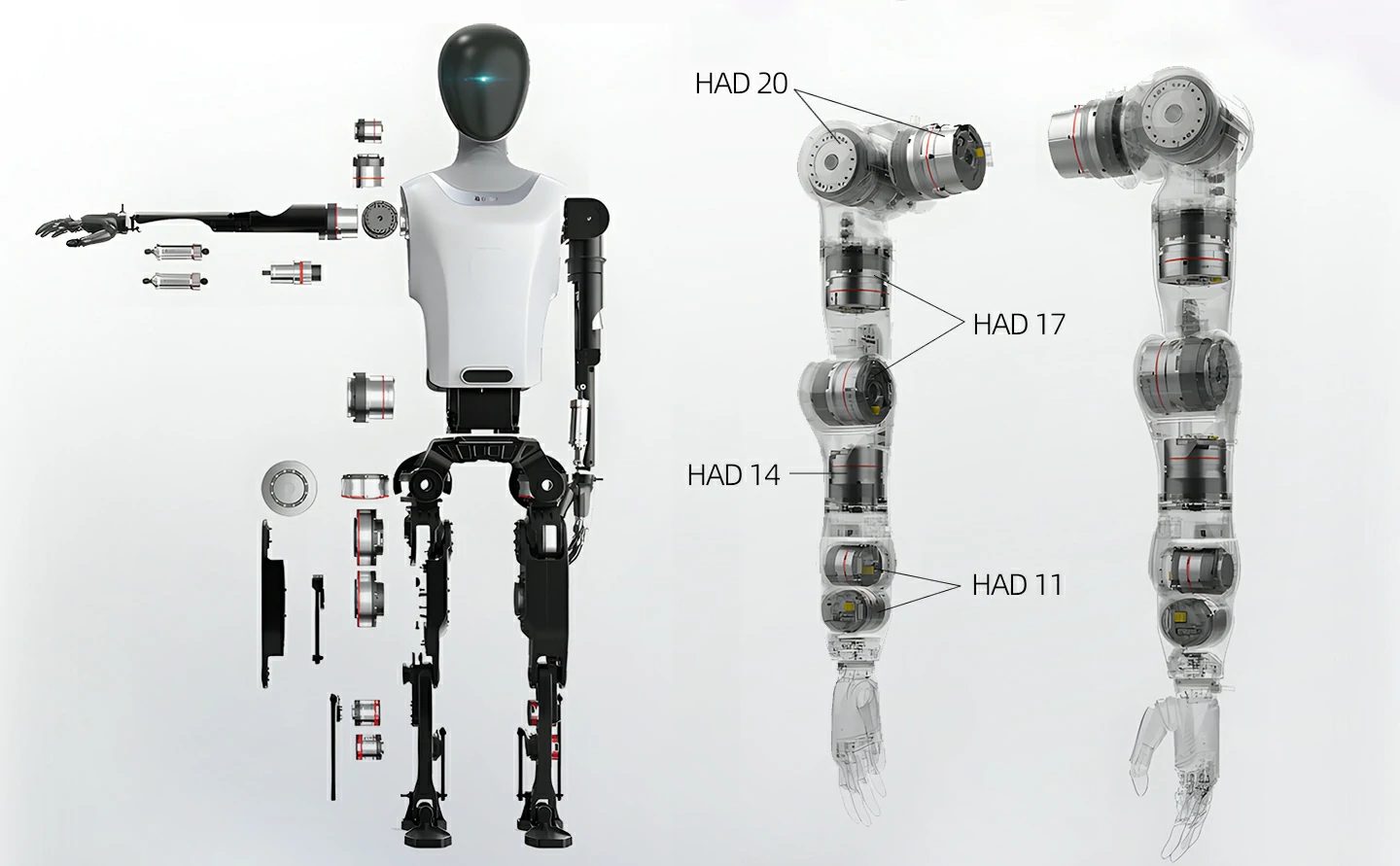

Mobile robots

Quadruped robot
Collaborative robotic arm

Automation
| Module Model | HAD-08 | HAD-11 | HAD-14 | HAD-17 |
| Reducer Typer | Harmonic Reducer | Harmonic Reducer | Harmonic Reducer | Harmonic Reducer |
| Reduction Ratio | 101 | 101 | 101 | 101 |
| Rated Torque(N.m) | 2.4 | 4.8 | 15 | 35 |
| Maximum Allowable Torque for Start and Stop(N.m) | 4.5 | 11 | 35 | 70 |
| Average Torque(N.m) | 4 | 8.5 | 15 | 55 |
| Maximum Allowable Shock Torque(N.m) | 10 | 25 | 70 | 145 |
| Rated Speed RPM(N.m) | 39.6 | 39.6 | 39.6 | 39.6 |
| Brake Inclusion (Yes/No) | Non-customizable Brake | Non-customizable Brake | Non-customizable Brake | Non-customizable Brake |
| Dimensions (Outer Diameter × Axial Length)(mm) |
Φ52*60 | Φ52*61 | Φ70*72 | Φ80*77 |
| Weight(Kg) | 0.23 | 0.5 | 0.7 | 0.9 |
| Hollow Diameter(mm) | 8 | 8 | 12 | 14 |
| DC Voltage | 48 | 48 | 48 | 48 |
| Driver | Built-in | Built-in | Built-in | Built-in |
| Dual Encoder/Bit Number | 17 | 17 | 17 | 17 |
| Communication | EtherCAT | EtherCAT | EtherCAT | EtherCAT |
| Working Environment Temperature | -20~40° | -20~40° | -20~40° | -20~40° |
| Working Temperature Rise | ≤40 | ≤40 | ≤40 | ≤40 |
| Allowable Bending Moment Of Spindle | 20 | 60 | 60 | 124 |
| Lifespan In Hours | 7500 | 7500 | 10000 | 10000 |
| Module Model | HAD-20 | HAD-25 | HAD-32 | HAD-40 |
| Reducer Typer | Harmonic Reducer | Harmonic Reducer | Harmonic Reducer | Harmonic Reducer |
| Reduction Ratio | 101 | 101 | 121 | 161 |
| Rated Torque(N.m) | 60 | 90 | 200 | 380 |
| Maximum Allowable Torque for Start and Stop(N.m) | 120 | 230 | 484 | 840 |
| Average Torque(N.m) | 65 | 140 | 290 | 586 |
| Maximum Allowable Shock Torque(N.m) | 200 | 400 | 900 | 1530 |
| Rated Speed RPM(N.m) | 39.6 | 39.6 | 29.7 | 18.6 |
| Brake Inclusion (Yes/No) | Yes | Yes | Yes | Yes |
| Dimensions (Outer Diameter × Axial Length)(mm) |
Φ90*87 | Φ110*102.5 | Φ142*160 | Φ170*210 |
| Weight(Kg) | 1.3 | 2.2 | 4.8 | 7 |
| Hollow Diameter(mm) | 14 | 25 | 23 | 30 |
| DC Voltage | 48 | 48 | 48 | 48 |
| Driver | Built-in | Built-in | Built-in | Built-in |
| Dual Encoder/Bit Number | 17 | 17 | 17 | 17 |
| Communication | EtherCAT | EtherCAT | EtherCAT | EtherCAT |
| Working Environment Temperature | -20~40° | -20~40° | -20~40° | -20~40° |
| Working Temperature Rise | ≤40 | ≤40 | ≤40 | ≤40 |
| Allowable Bending Moment Of Spindle | 187 | 258 | 580 | 850 |
| Lifespan In Hours | 10000 | 10000 | 10000 | 10000 |
