
Home > Harmonic Robot Joint Actuator > P Series Robot Joint Module

The HU series Joint actuator are optimized and upgraded based on self-developed servo driver and absolute encoder technology, and are committed to providing customers with simpler, more efficient and safer robot solutions.
Max rated torque: 320NM
Peak Speed : 100RPM
Rated Voltage: 24-48V
Communication: Canopen/Ethercat

 HU series joint actuators quick selection table
HU series joint actuators quick selection table| Model | HU11H-52 | HU14H-70 | HU17H-80 | HU20H-90 | HU25H-110 | HU32H-142 | HU40H-170 |
| Gear ratio | 51/101 | 51/101 | 51/101 | 81/101/121 | 81/101/121 | 81/101/121/161 | 81/101/121/161 |
| Rated torque (N.m) at 2000 rpm | 3.5/5 | 6.6/9.6 | 19.8/30 | 42/50/50 | 78/84/84 | 146/169/169/169 | 255/320/320/320 |
| Rated speed at the output(rpm) | 39/20 | 39/20 | 39/20 | 20/25/17 | 25/20/17 | 25/20/17/12 | 25/20/17/12 |
| Hollow diameter (mm) | 8 | 10.8 | 10.8 | 13 | 13 | 22 | 23 |
| Brake (B/N) | B/N | B/N | B/N | B/N | B/N | B/N | B/N |
| Weight (kg) | 0.44/0.4 | 0.89/0.81 | 1.25/1.14 | 1.74/1.58 | 2.54/2.35 | 6.31/5.83 | 9.34/8.7 |
| Rated operating voltage(V) | 48V | ||||||
|
Dimensions (outer diameter x
axial direction)(mm) |
Ф52 x 63 | Ф70x 75.4 | Ф80 x 78 | Ф90 x 85.8 | Ф110 x 94 | Ф142x 144 | Ф170x 149 |
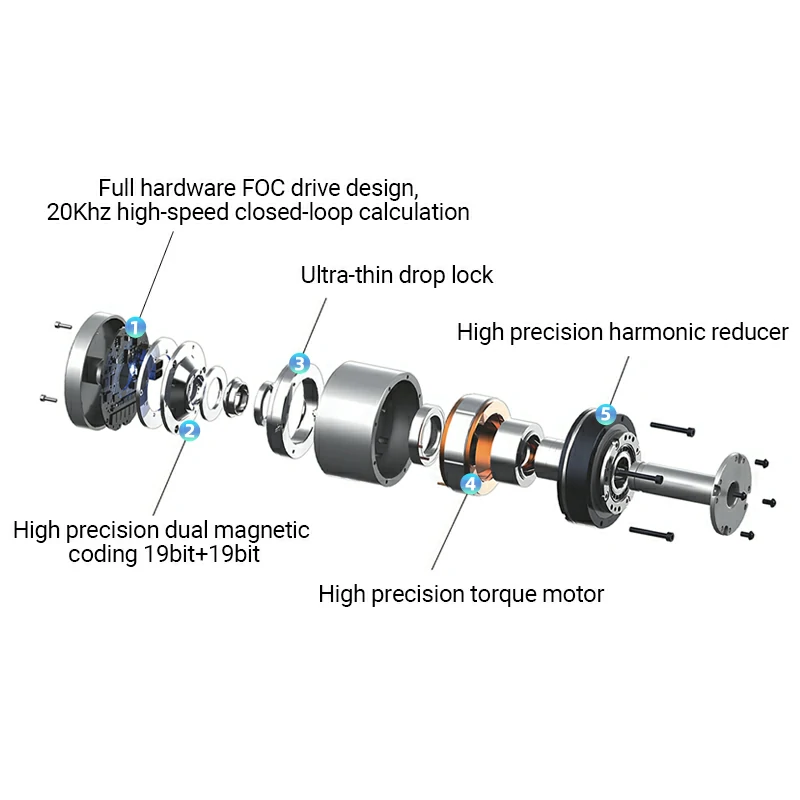
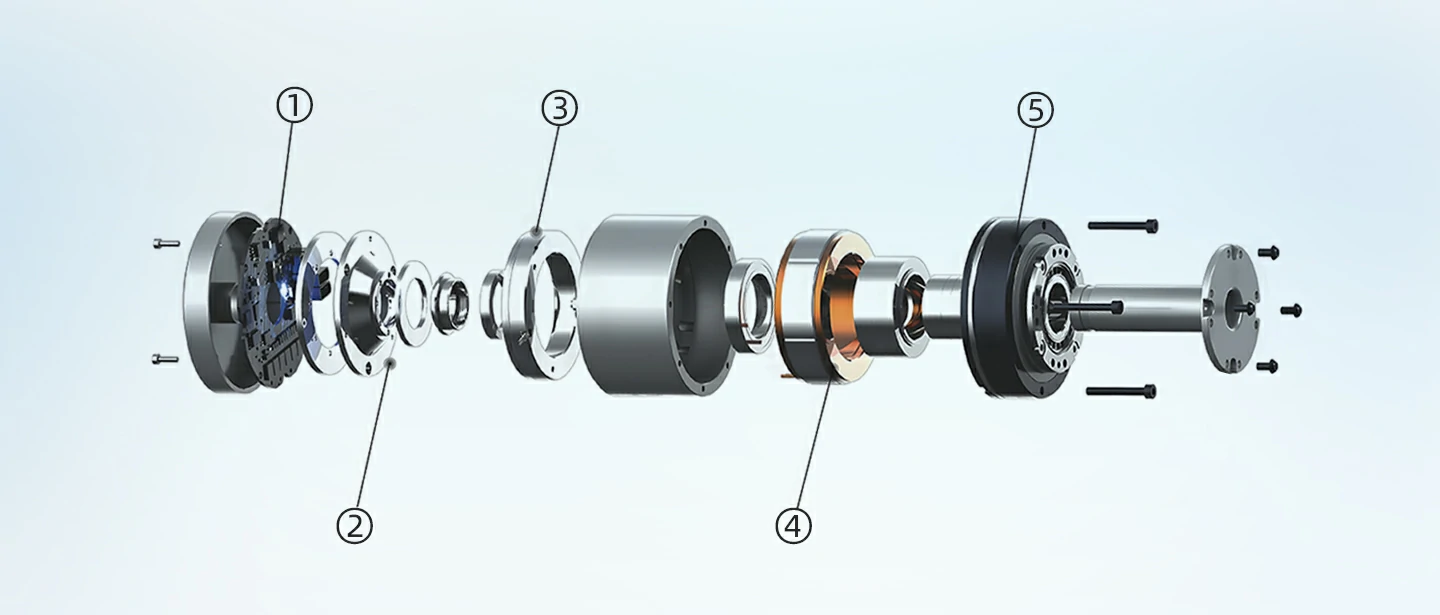 ① High-performance servo driver ②Double absolute magnetic braiding 19bit ③Ultra-thin drop lock ④Frameless torque motor ⑤High precision harmonic reducer
① High-performance servo driver ②Double absolute magnetic braiding 19bit ③Ultra-thin drop lock ④Frameless torque motor ⑤High precision harmonic reducer
Highly integrating key components such as servo drives, motor-side and output-side dual absolute encoders, frameless torque motors, brakes and precision harmonic reducers in a limited space, significantly reducing customers' manpower and time investment in device selection, structural design, procurement and assembly, and significantly improving development efficiency.
A neural circuit with precise bidirectional calibration and real-time correction is constructed, which is the fundamental guarantee for achieving high dynamic and high-precision motion control.

This function uses dual-channel independent hardware interlocking to physically cut off the torque output from the source within microseconds, while retaining the system's perception and recovery capabilities - this is the necessary cornerstone for collaborative robots to obtain human-machine integration safety qualifications and enter the complex application market.
It adopts zero-backlash harmonic transmission design to ensure two-way motion engagement without backlash. Transmission error of ≤20 arc seconds provides a nanoscale response basis for trajectory repeatability and cutting roundness.


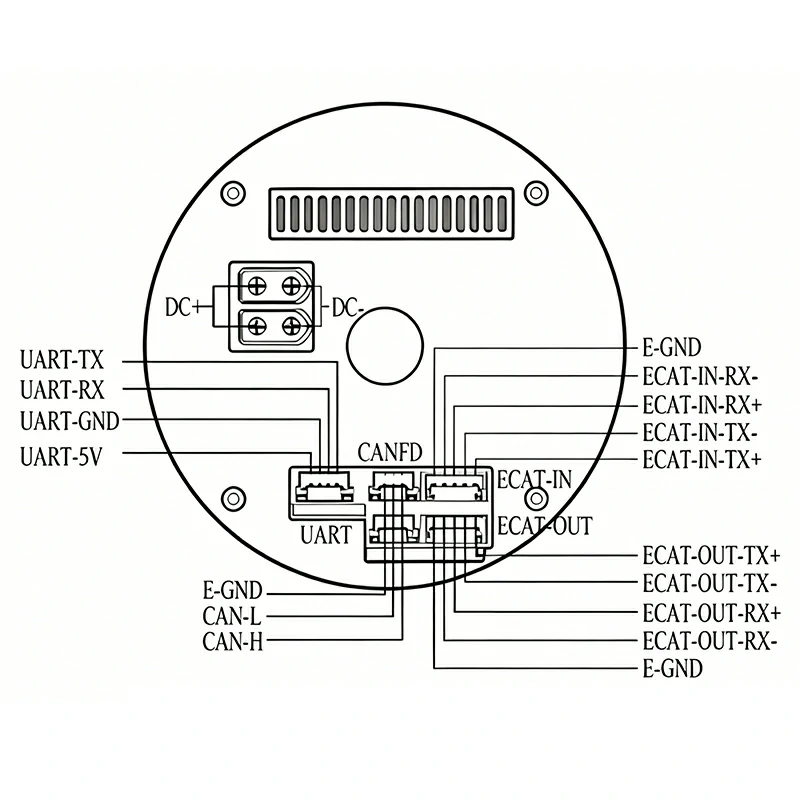
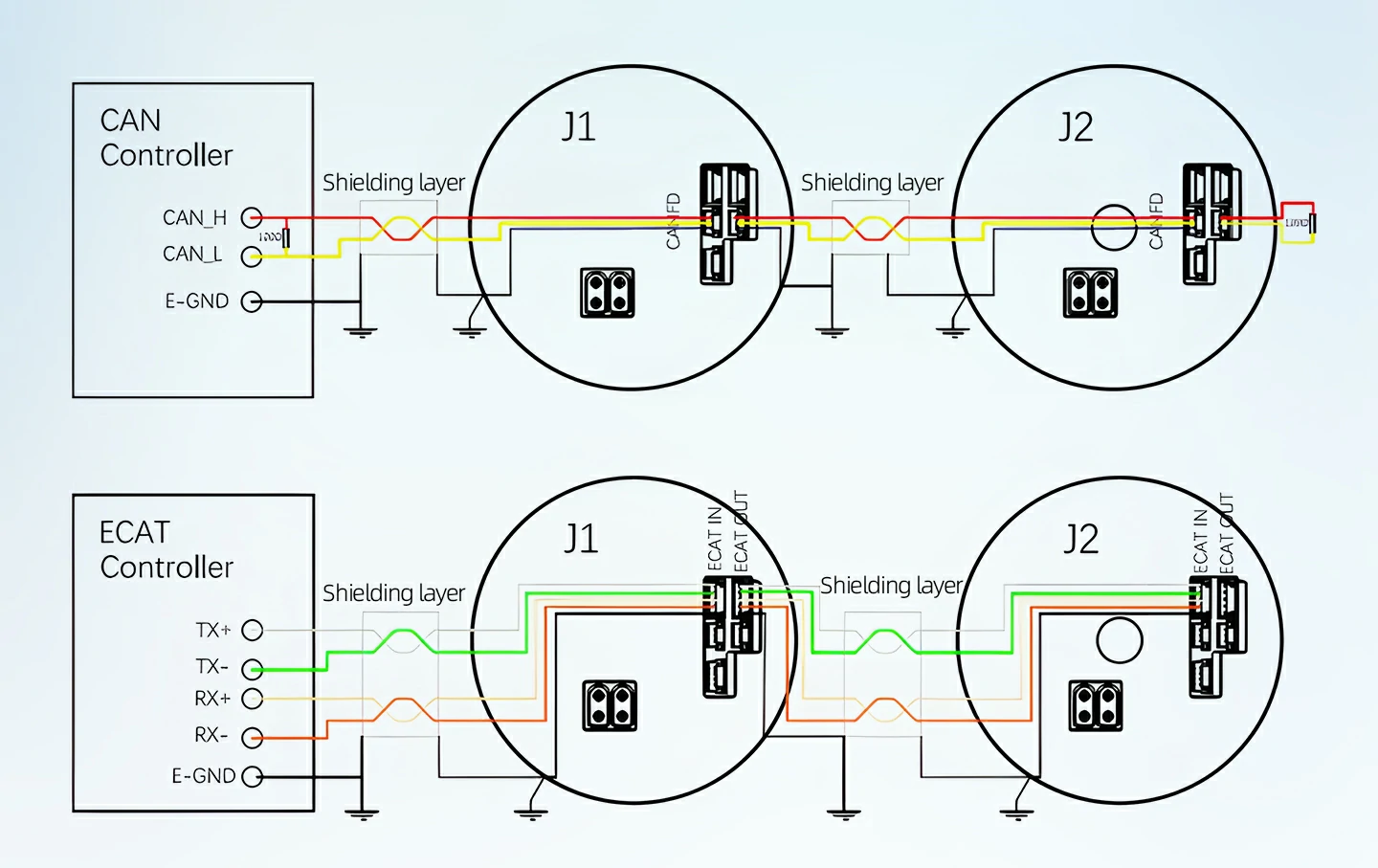
Standard CANopen and EtherCAT communication interfaces, compatible with various mainstream controllers. Make system integration more flexible and efficient
The joint module achieves both the "smartness" of optical-level resolution and the "solidness" of magnetic non-contact sensing, and achieves self-diagnosis and functional safety with "dual" channel redundancy. It is a key technology choice for collaborative robots to strike a balance between control accuracy and industrial reliability.


Bionic and Specialized Robots

Mobile composite robot

Medical rehabilitation

Anti-explosion inspection robot
| Model | HU11L-52 | HU11H-52 | HU11H-60 | HU14H-70 | HU17H-80 | HU20H-90 | HU25H-110 | HU32H-142 | HU40H-170 |
| Gear ratio | 51/101 | 51/101 | 51/101 | 51/101 | 51/101 | 81/101/121 | 81/101/121 | 81/101/121/161 | 81/101/121/161 |
| Rated torque (N.m) at 2000 rpm | 2.4/3 | 3.5/5 | 3.5/5 | 6.6/9.6 | 19.8/30 | 42/50/50 | 78/84/84 | 146/169/169/169 | 255/320/320/320 |
| Peak torque (N.m) | 5.8/6.5 | 8.3/11 | 8.3/11 | 23/34 | 42/66 | 91/102/108 | 169/194/207 | 376/411/436/459 | 641/702/762/800 |
| The maximum allowable torque(N. m) | 11.5/15 | 17/25 | 17/25 | 43/66 | 86/134 | 158/182/182 | 315/351/376 | 702/800/848/848 | 1210/1334/1458/1458 |
| Rated speed at the output(rpm) | 39/20 | 39/20 | 39/20 | 39/20 | 39/20 | 20/25/17 | 25/20/17 | 25/20/17/12 | 25/20/17/12 |
| Peak speed (rpm) | 100/50 | 100/50 | 100/50 | 90/45 | 88/44 | 38/31/25 | 44/36/30 | 30/24/20/15 | 30/24/20/15 |
| Brake (B/N) | B/N | B/N | B/N | B/N | B/N | B/N | B/N | B/N | B/N |
| Backlash(Arcsec) | ≤30 | ≤30 | ≤20 | ≤20 | ≤20 | ≤20 | ≤20 | ≤20 | ≤20 |
| Hollow diameter (mm) | 8 | 8 | 8 | 10.8 | 10.8 | 13 | 13 | 22 | 23 |
| Weight (kg) | 0.39/0.35 | 0.44/0.40 | 0.59/0.54 | 0.89/0.81 | 1.25/1.14 | 1.74/1.58 | 2.54/2.35 | 6.31/5.83 | 9.34/8.7 |
|
Dimensions (outer diameter x
axial direction)(mm) |
Ф52 x 63 | Ф52 x 68 | Ф60 x 68.5 | Ф70x 75.4 | Ф80 x 78 | Ф90 x 85.8 | Ф110 x 94 | Ф142x 144 | Ф170x 149 |
| Output radial (dynamic/static) allowable load (N) | 130 | 130 | 130 | 270 | 400 | 650 | 900 | 1350 | 2000 |
| Output axial (dynamic/static) allowable load (N) | 130 | 130 | 130 | 270 | 400 | 650 | 900 | 1350 | 2000 |
| Rated operating voltage(VDC) | 48 | ||||||||
| Operating voltage range(VDC) | 24-48 | ||||||||
| Encoder/bit(bit) |
Dual absolute / 19-bit motor end & 19-bit reducer end |
Double absolute / Input 17 & Output 19 | |||||||
|
Communication Protocol |
EtherCAT / CANopen | ||||||||
|
Control Mode |
Profile Position Mode (PP), Profile Speed Mode (PV), Profile Torque Mode (PT), Cyclic Synchronous Position Mode (CSP), Cyclic Synchronous Speed Mode (CSV), etc. | ||||||||
|
Operating ambient temperature (°C) |
-20~60 |
||||||||
| Enclosure operating temperature rise (°C) | ≤60 | ≤80 | |||||||