
Home > Micro robot joint actuators > MI robot joint actuators



MI Miniature joint actuator covering multiple sizes from φ16mm to φ30mm, it is suitable for various scenarios ranging from precision micro-operation to high-load operations.
Diameter: 16-30 mm
Supply Voltage: 12V/24V/48V
Rated Speed: ≤2000 Rpm
Total Weight: 24.3-133g

| φ16mm | φ20mm | φ25mm | Φ30mm | ||||||||
| Single Motor Data | Supply Voltage (V) | 12/24 | 12/24/48 | 12~18 | 12~18 | ||||||
| No-Load Speed (Rpm) | ≤3000 | ≤3000 | ≤3000 | ≤3000 | |||||||
| Rated Speed (Rpm) | ≤2000 | ≤2000 | ≤2000 | ≤2000 | |||||||
| *Continuous Stall Torque (Winding Temperature 145°C) (mNm) | >7.1 | >17.2 | 43 | 59 | |||||||
| *Starting Torque (Winding Temperature 25°C) (mNm) | >10.3 | >24.9 | - | - | |||||||
| *Continuous Stall Phase Current (A) | 0.65 | 0.73 | 1.2 | 2.4 | |||||||
| Gearhead Data | Reduction Ratio | 30 | 40 | 50 | 15 | 30 | 50 | 30 | 50 | 30 | 50 |
| Backdriving Torque (mNm) | <100 | <130 | <150 | <95 | <180 | <250 | - | - | |||
| Gear Backlash (Arcmin) | 20 | 20 | 15 | 15 | |||||||
| Encoder | Absolute Encoder | Absolute Encoder | Absolute Encoder | Absolute Encoder | |||||||
| Communication Protocol | SPI | SPI | CAN FD | CAN FD | |||||||
| Total Weight (g) | 24.3 (360° Bracket) / 26.1 (L-Type Bracket) | 37.2(360° Bracket) / 41.6 (L-Type Bracket) | 93 (Rotary Bracket) / 103 (Fixed Bracket) | 123 (Rotary Bracket) / 133 (Fixed Bracket) | |||||||
| *Note: Actual values may vary by ±10% from theoretical values. | |||||||||||
.jpg)
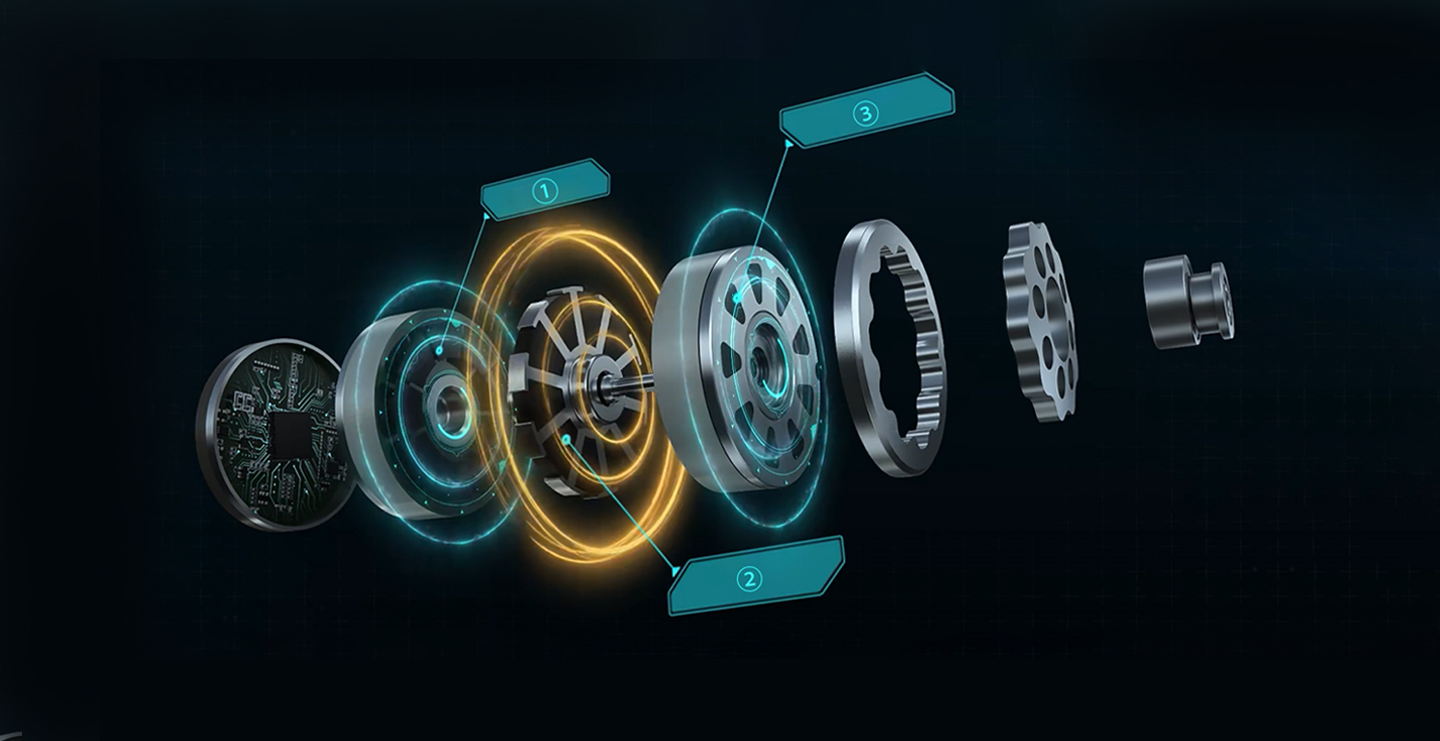
Utilizing an axial flux motor design, the actuator achieves significantly higher power density, delivering 2–4 times the torque output of conventional brushless motors within the same volu
Employs an ultra-high-density HDI interconnect board to replace conventional stator windings, enhancing thermal performance, improving manufacturing yield, and reducing overall production costs.
.jpg)
.jpg)
Incorporates an ultra-precision cycloidal gear transmission system, enabling a more compact and lightweight structure while delivering higher positioning accuracy and smoother motion control.
Utilizing a quasi-direct drive architecture, the actuator achieves a more compact structure, higher dynamic performance, and more precise motion control.
.jpg)
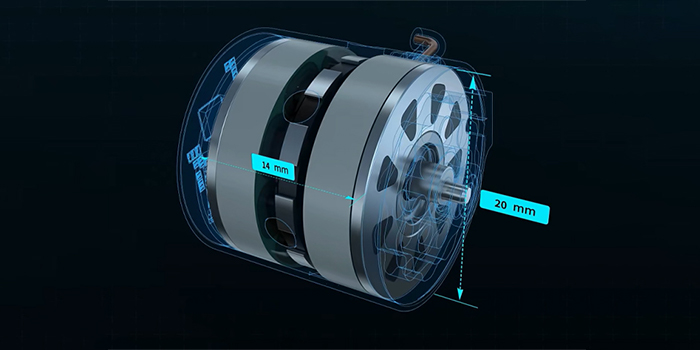
Highly integrated mechanical design minimizes volume and weight while ensuring high torque density and structural strength. The compact form factor improves integration flexibility and is suitable for robotic joints with strict space and payload requirements.
.jpg)
Dexterous Hands
.jpg)
Small humanoid hands
.jpg)
Medical pumps
.jpg)
Drones
| φ16mm | φ20mm | φ25mm | Φ30mm | ||||||||||
| Single Motor Data | Supply Voltage (V) | 12/24 | 12/24/48 | 12~18 | 12~18 | ||||||||
| No-Load Speed (Rpm) | ≤3000 | ≤3000 | ≤3000 | ≤3000 | |||||||||
| Rated Speed (Rpm) | ≤2000 | ≤2000 | ≤2000 | ≤2000 | |||||||||
| *Continuous Stall Torque (Winding Temperature 145°C) (mNm) | >7.1 | >17.2 | 43 | 59 | |||||||||
| *Starting Torque (Winding Temperature 25°C) (mNm) | >10.3 | >24.9 | - | - | |||||||||
| *Continuous Stall Phase Current (A) | 0.65 | 0.73 | 1.2 | 2.4 | |||||||||
| *Maximum Stall Torque (mNm) | >16.5 | >35.3 | 120 | 85 | |||||||||
| *Maximum Stall Phase Current (A) | 1.5 | 1.5 | 3.2 | 3.2 | |||||||||
| *Winding Resistance (Ω) | 6 | 6.6 | 3.8 | 1.2 | |||||||||
| Three-Phase Resistance Imbalance (%) | ≤2 | ≤2 | ≤2 | ≤2 | |||||||||
| Winding Inductance (mH) | 0.5 | 1.2 | 2.1 | 0.6 | |||||||||
| Three-Phase Inductance Imbalance (%) | ≤2 | ≤2 | ≤2 | ≤2 | |||||||||
| Torque Constant (mNm/A) | 13 | 28.1 | 42 | 27.5 | |||||||||
| Speed Constant (rpm/V) | 734 | 339 | 227 | 347 | |||||||||
| Rotor Inertia (gcm2) | 0.84 | 1 | 6.1 | 15.8 | |||||||||
| Gearbox Data | Reduction Ratio | 30 | 40 | 50 | 15 | 30 | 50 | 30 | 50 | 30 | 50 | ||
| Gear Efficiency (Rated)(%) | 72 | 72 | 68 | 65 | 65 | 64 | 70 | 60 | 75 | 60 | |||
| Gear Efficiency (Stall Point) (%) | 62 | 62 | 58 | 55 | 55 | 58 | 60 | 55 | 65 | 55 | |||
| Continuous Stall Torque (Winding Temp 145°C) (mNm) | 130 | 170 | 200 | 180 | 350 | 450 | 750 | 1150 | 1100 | 1500 | |||
| Starting Torque (Winding Temp 25°C) (mNm) | 250 | 320 | 400 | 280 | 550 | 800 | 1500△ | 1800 | 14500 | 2200△ | |||
| Backdriving Torque (mNm) | <100 | <130 | <150 | <95 | <180 | <250 | - | - | |||||
| Gear Backlash (Arcmin) | 20 | 20 | 15 | 15 | |||||||||
| Encoder | Absolute Encoder | Absolute Encoder | Absolute Encoder | Absolute Encoder | |||||||||
| Communication Protocol | SPI | SPI | CAN FD | CAN FD | |||||||||
| Total Weight (g) | 24.3 (360° Bracket) / 26.1 (L-Type Bracket) | 37.2(360° Bracket) / 41.6 (L-Type Bracket) | 93 (Rotary Bracket) / 103 (Fixed Bracket) | 123 (Rotary Bracket) / 133 (Fixed Bracket) | |||||||||
| Module Inertia (gcm2) | 1.77 | 2.52 | 12.7 | 30.4 | |||||||||
| Thermal Data | Power Loss (W) | 2.2 | 3.7 | 5.7 | 3 | 5 | 7.8 | 5 | 8.3 | 6.2 | 10.3 | ||
| Motor Operating Temperature (℃) | 80 | 115 | 145 | 80 | 115 | 145 | 80 | 115 | 80 | 115 | |||
| *Note: Actual values may vary by ±10% from theoretical values. △Output torque is limited by mechanical strength. |
|||||||||||||